Alexnet
多个CNN层堆叠而成的经典卷积神经网络,用于图像分类的任务
- 使用了ReLU激活函数,防止深层次的网络导致梯度消失
- 使用Dropout正则化,解决过拟合问题
- 使用池化层进行进行降维
GoogleNet
传统CNN通多堆叠卷积层可以学习到图像更多特征,但会导致
- 计算量爆炸
- 梯度消失
- 过拟合
Googlenet设计了宽而深的结构,创造性引入了Inception模块和辅助分类器模块
Inception模块
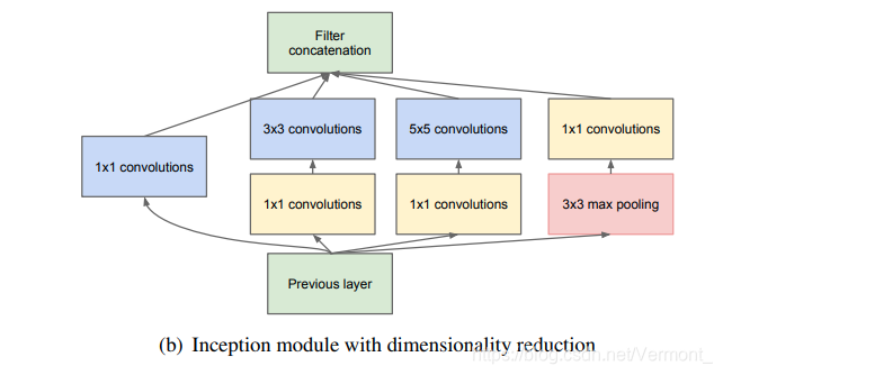
- 并行多尺度卷积:在同一层并行使用$1 \times 1 、 3 \times 3、5 \times 5 $和最大池化,融合不同感受野的特征
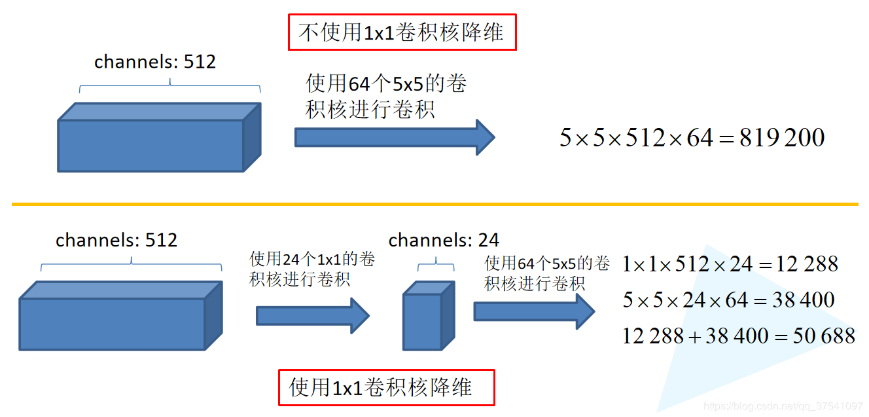
- 先使用$1 \times 1 $卷积进行降维,压缩通道数,同时加上ReLU,可以显著降低参数量
辅助分类器模块
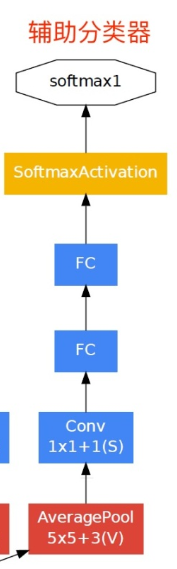
- GoogleNet有3个输出层,其中2个是辅助分类层
- 训练模型时,将2个辅助分类器的损失乘以权重加到总损失上
- 辅助分类器也能预测类别,在整个网络中起到一个调整的作用,可以防止网络发生过拟合
- 也可以加速梯度传递,防止梯度消失
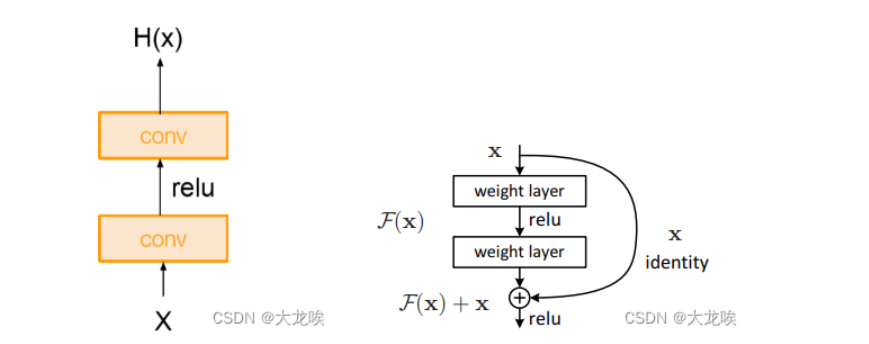
Resnet
2015年由何凯明团队提出,利用短路连接解决深度卷积神经网络中梯度消失的问题
这样使得网络在最差情况下也能获得和输入一样的输出,不会出现网络退化的问题
ResNet Block
BasicBlock不会对每一个block的输出进行升维
BottleNeck会对每个layer的第一个block的输出进行升维,其输出通道数是输入中间通道数的4倍
二者结构如下所示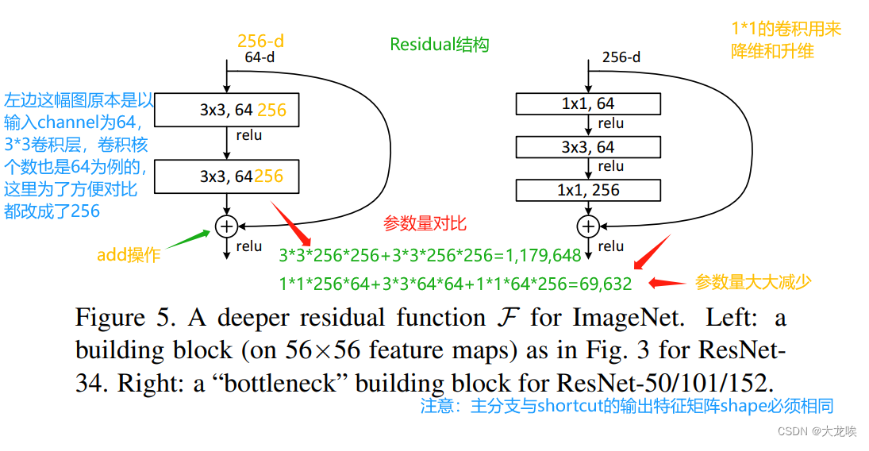
BasicBlock
从Layer2开始,每个 layer 的第一个 Block 都会升维,而后续 Block 只是保持这个维度不变
两个的卷积核,输出通道为64
block的输入输出通道数相同
重点
- 在第1个layer中通道数不增加
- 进入到第2个layer的第1个block,通道数增加,但在后面的block(相同layer)中通道数不变
BottleNeck
每个Layer的第一个 Block 都会升维,而后续 Block 只是保持这个维度不变
将的卷积层替换为
先通过的卷积核进行通道降维,巧妙扩张或缩减特征图的维度,一般降到输入维度的四分之一
再用进行主卷积
最后用进行通道升维,一般升到输入中间通道数的4倍
重点
- 经过每个layer的第1个block之后通道数都会上升,但在后面的block(相同layer)中通道数不变
- 通道数增加至输入中间通道数,也就是经过的卷积的输出通道数的4倍
- 输入中间通道数会比输入通道数小二分之一
可以减小计算量,同时保证输入输出维度一致,可进行残差连接
注意:
- 当输入输出尺寸或者通道数不一致的时候,需要下采样
- 只有每个
layer的第一个block会使用stride=2进行下采样,后续block必须保持stride=1
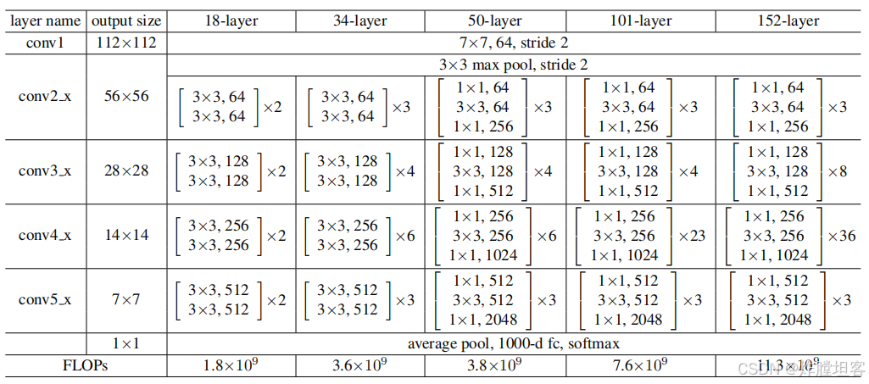
各类别ResNet一览
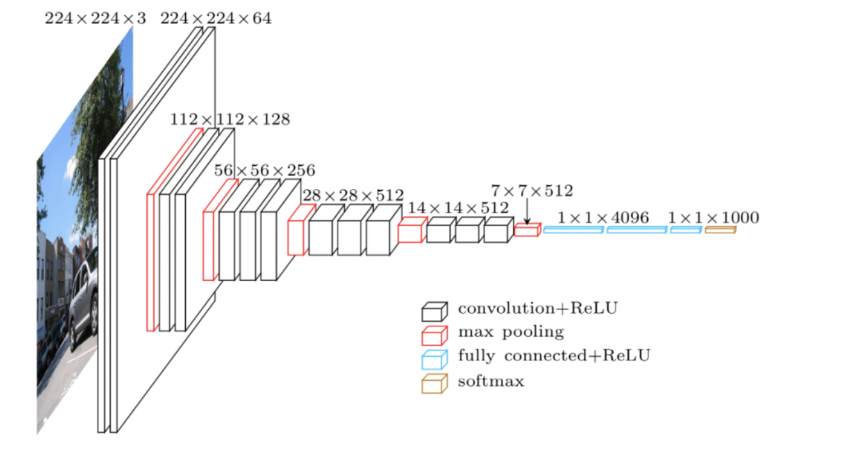
VGG
深度卷积神经网络,固定卷积核大小为,一个非常经典的架构
使用多个小卷积核()代替大卷积核(如 , )
- 每层使用固定大小的 卷积核
- 步幅为 1(stride = 1),padding=1,保证特征图大小不变
- 通过堆叠多个 卷积,获得更大的感受野
MobileNet
轻量级神经网络,可部署在边缘设备上
其**计算时间95%**都花费在卷积上
深度可分离卷积
由深度卷积和逐点卷积组成(显著减少计算量和参数量),最后进行归一化和非线性激活
深度卷积用于滤波
对每个输入通道单独进行空间滤波,提取局部特征
与普通卷积不一样,每个输入通道独立使用一个卷积核,不与其他通道交互
逐点卷积用于合并
- 混合通道信息,生成新的特征图
宽度乘子
通过系数等比例减少所有层的通道数,进一步压缩模型
分辨率乘子
通过系数降低输入图像分辨率,减少计算量
激活函数
使用了ReLU6,防止激活值过大导致量化时精度损失
倒残差结构(Inverted Residuals)
借鉴了ResNet里面的残差结构
- 先降维再升维:ResNet里面的BottleNeck是先使用的卷积进行降维,再使用的卷积进行特征提取,最后使用的卷积进行降维
- 先升维再降维:MobileNetv2里面先使用的卷积进行升维,再使用的逐通道卷积(深度可分离卷积)进行特征提取,最后使用的卷积进行降维
- 可以激活更多特征通道,让模型学习到更加丰富的特征
- 深度可分离卷积在低维空间学习不到更多特征
线性瓶颈
低维空间使用ReLU会丢失部分特征信息(如负值被置零),因此在最后一层移除ReLU,改用线性激活
原因:
- 在变换过程中,需要将低维空间的信息转换到高维空间,再从高维空间转换为低维空间。如果输出维度高,信息损失小,输出维度低,信息损失大,如下图所示:

- 在MobileNetV1中,深度可分离卷积的卷积核中的数值大部分都为0,作者猜想是ReLU会把小于0的部分截断取0,容易造成信息的丢失,因此把ReLU更换为线性激活函数
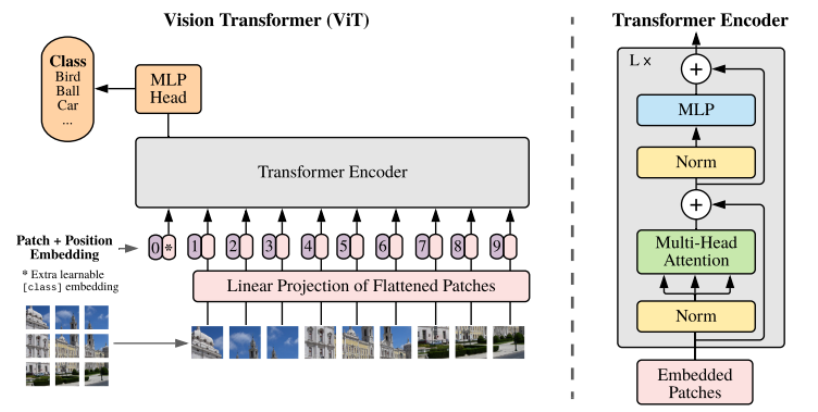
Vit(Vision Transformer)
贡献:首次将Transformer应用于图像分类,证明自注意力机制可完全替代传统卷积操作
工作流程:
- 将图像进行分块,分成多个patches,将图像展平为序列
- 送入线性投影层,将patches投影成D(通常是768)维向量,并且加入位置编码(绝对位置编码),再加上一个
[CLS]Token(类似Bert) - 送入transformer的encoder层,[CLS] Token会与所有patch交互,但其他patch之间也互相计算注意力
- 从encoder层出来后,将
[CLS]Token送入全连接层进行分类
局限性
- 依赖大规模数据集,在小规模数据集上泛化能力不佳
- 不像传统CNN具有针对图像的归纳偏置(Instructive Bias),也就是模型没有潜意识要去怎么处理图像,在小的数据集上鲁棒性差
- 对算力要求高,难以处理大分辨率图像, 因为要把图像分割成很多个patch,还要进行全局注意力计算,对算力要求高
Deit
旨在解决Vit在小数据集上泛化能力不佳的问题,引入了知识蒸馏并且改进了训练策略
知识蒸馏(distillation)
- 使用CNN或者Vit为教师模型进行知识蒸馏,双教师协同蒸馏
- Deit相对于Vit在encoder的输出层加入了一个
[distill]Token,用于接受教师模型的知识[distill]专门从教师模型中提取知识,计算教师模型输出的KL散度损失[CLS]计算真实标签的交叉熵损失
- 硬标签(hard distillation):限制两种模型输出的类别标签尽可能接近
- 软标签(soft distillation):限制两种模型输出的类别分布尽可能接近,使用KL散度进行分布距离的衡量
训练策略优化
- 优化器的改进
- 知识增强
- 正则化等
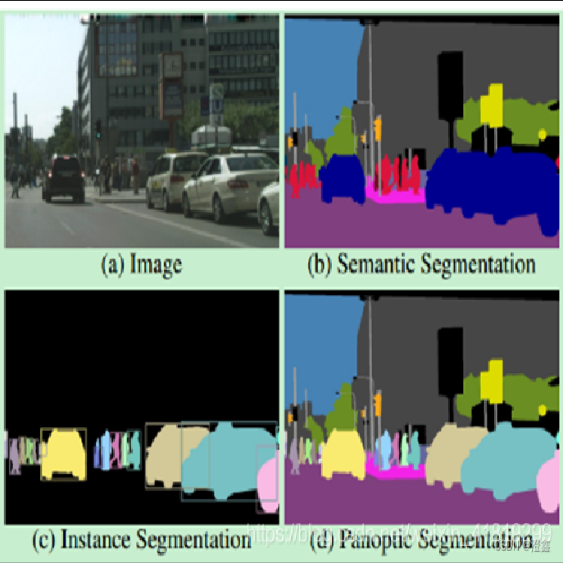
图像分割
语义分割(Semantic Segmentation)
- 为图像中的每个像素分配一个类别标签,不区分同类对象的不同实例(会将图中所有的人归为同一类)
- 只关注像素类别
实例分割(Instance Segmentation)
- 在语义分割的基础上,区分同一类别的不同实例(如区分图中不同的个体)
全景分割( Panoptic Segmentation)
- 统一语义分割和实例分割,要求对图像中所有像素进行分类,并区分可数对象(如车辆、人)和不可数区域(如天空、道路)
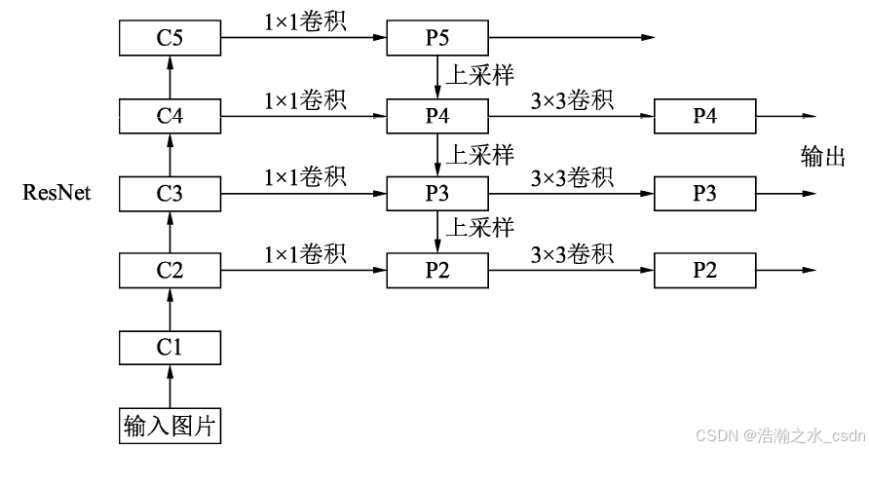
FPN(Feature Pyramid Network)
还tm是何kaiming提出的,卧槽
为何要提出这个网络?
- 传统卷积神经网络仅在最后一个特征图上进行后续操作(如预测),而这类图像的分辨率又较小,造成小物体在此图中的信息较少,模型无法精确检测到小物体,造成性能缺失
主要目的:通过特征融合的方式,在不显著增加计算量的情况下,提升多尺度目标检测性能
具体有什么贡献?
- 提出一种新的特征金字塔结构,构建自下向上和自上向下的特征融合路径,融合不同尺度特征图,使得大小物体的检测性能都提高了
- 最重要的还是不增加计算量
网络结构如下
- 自下而上逐步下采样采用的Backbone是ResNet,这个过程中,图像分辨率不断降低,语义信息不断丰富
- 自上而下则是将低分辨率图片进行转置卷积(上采样),并与对应的低层特征图融合(横向连接)
- 在特征金字塔的每一层上都可以独立的进行对应任务的预测
- 使用卷积统一通道数
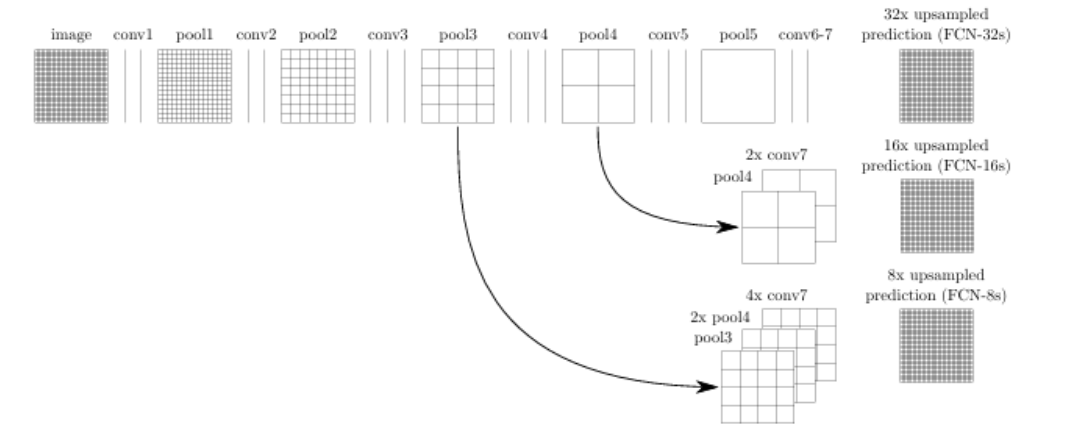
FCN(Fully Convolutional Network)
做图像分割的
为何要提出这个网络?
- 传统卷积神经网络会对图片进行不断的下采样,即分辨率逐渐减小,这样子可以提取更加抽象的语义特征,但是对于语义分割这种像素级的预测任务来说,下采样过多会带来严重的空间信息丢失,导致预测边界不清晰。
- 为了弥补下采样带来的空间信息缺失,FCN提出了转置卷积进行上采样,同时引入跳跃连接将浅层特征和深层特征进行结合
特点:全卷积网络,不含全连接层,常用于语义分割
- 不含全连接层,把最后的全连接层换成的卷积核,可以适应任意尺寸的输入
- 卷积核的输出通道数是要预测的类别数,最后在每个像素的通道数上作softmax即可预测这个像素属于什么类别
- 转置卷积进行上采样
- 引入跳跃连接
FCN主要分为两部分
- 全卷积网络:以VGG、ResNet为主的Backbone
- 上采样部分:使用转置卷积还原回原图尺寸
FCN-32s:直接上采样32倍FCN-16s:先上采样2倍,然后融合pool4,再上采样16倍FCN-8s:先上采样2倍,然后融合pool4,再上采样2倍,然后融合pool3,再上采样8倍
U-Net
- Unet采用了编码器-解码器架构,并加入了跳跃连接,将浅层的高分辨率特征直接传递到解码器中,有助于弥补上采样过程中的细节丢失
- 适合应用于小型数据集,常用于医学影像分割
- 常用于语义分割
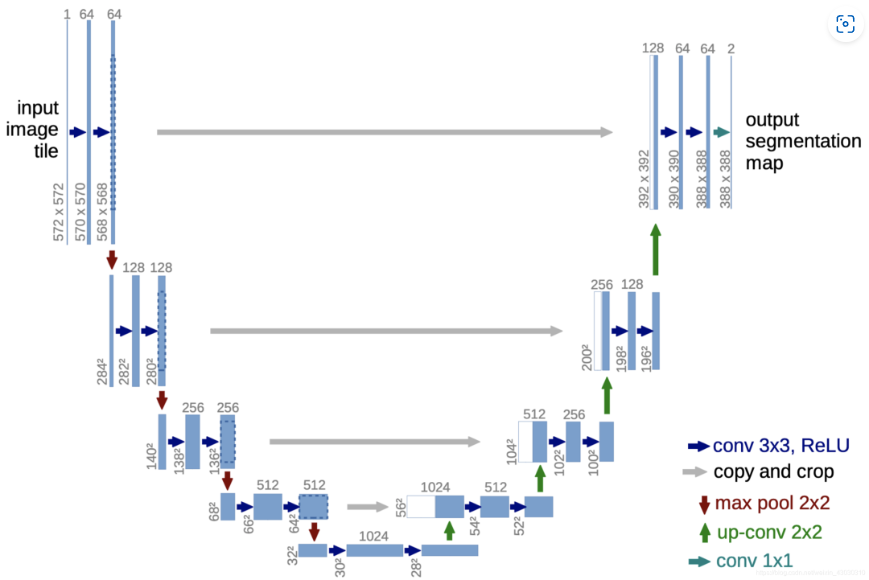
工作流程
- 输入图像为大小
- 蓝色箭头卷积参数为
in_channels=1, out_channels=64, kernel_size=3, stride=1, padding=0,每进行一次卷积和ReLU,图像尺寸-2,通道数逐层增加至1024 - 最大池化的卷积核和步长都设置为2,每进行一次池化,输出尺寸减半,通道数不变
- 每进行一次上采样(转置卷积),通道数减半,图像尺寸加倍,同时在解码器模块中也会有卷积参与
- 在进行跳跃连接时,需要对下采样的图像进行裁剪,之后与上采样图像进行拼接
深监督
原始Unet并未使用这个方法,但这个方法在后来对Unet的改进中被使用
我个人认为其作用和GoogleNet的辅助分类器大差不差,都是加入了辅助损失函数防止梯度消失
深监督指的是在网络的中间层添加辅助损失函数,简单来说就是加网络的中间层加一个输出层,有利于
- 缓解梯度消失:通过多路径反向传播加速训练
- 改善特征学习
- 早期收敛:浅层网络也能输出初步结果
- 防止过拟合
IoU(交互比)
用于衡量预测区域与真实区域重叠程度的指标,核心思想是计算两者的交集与并集的比值,如下,用预测框(A)和真实框(B)的交集除二者并集
常用于目标检测,图像分割等场景,实际应用时分子分母都要加上平滑项
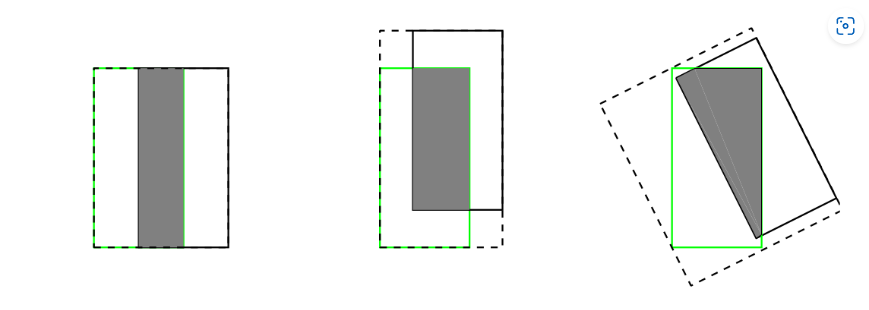
但IoU也有如下缺点:
- 当预测框和真实框完全不重合时,梯度为0,无法优化
- 无法精确反映两者重合度大小,相同的IoU可能有不同的重合度情况。如下所示,三种情况IoU都相等,但他们的重合度情况不一样,左边最好,右边最差。
Dice Loss
基于Dice系数,用于衡量预测分割掩码和真实掩码的重叠程度,主要用于二分类任务
其中:
- :预测的分割掩码(通常为概率图,值在0~1之间)。
- :真实的分割掩码(二值图,0或1)。
- :预测与真实掩码的交集(逐像素相乘后求和)。
- :预测和真实掩码的像素值之和。
不依赖绝对像素数量,只关注重叠比例,对像素少的目标进行分割仍可以有效优化
实际应用时分子分母都要加上平滑项
BCE Loss
二分类交叉熵损失函数,衡量预测概率分布与真实分布的差异,在图像分割领域常与DiceLoss结合,
其中:
- :真实标签
- :预测概率
- :像素总数
其梯度稳定,且对小目标友好(因为其对像素级分类更敏感)
但是在类别不平衡时,会被多数类(背景)主导,导致模型忽视少数类(肿瘤)
Deeplab
用于语义分割
v2、v3的backbone(骨干网络)为ResNet
问题:
- 图像多次下采样分辨率降低
- 要对目标进行多尺度特征提取
LargeFov
空洞卷积
Deeplab中引入空洞卷积扩大了卷积核的感受野而不增加参数量或者计算量!!!,有效捕捉多尺度上下文信息
- 无需下采样即可获得大感受野
- 高膨胀率下,卷积核采样点过于稀疏,可能丢失局部连续性信息
相较于VGG的改进
- 将VGG的全连接层(
FC6、FC7)转换为 卷积以保留空间信息。 - 进一步用 空洞卷积(
r=12)替换 卷积,以极低计算量实现全局感受野 - 最后VGG的全连接分类层用卷积核进行分类**(卷积核也可以进行分类)**
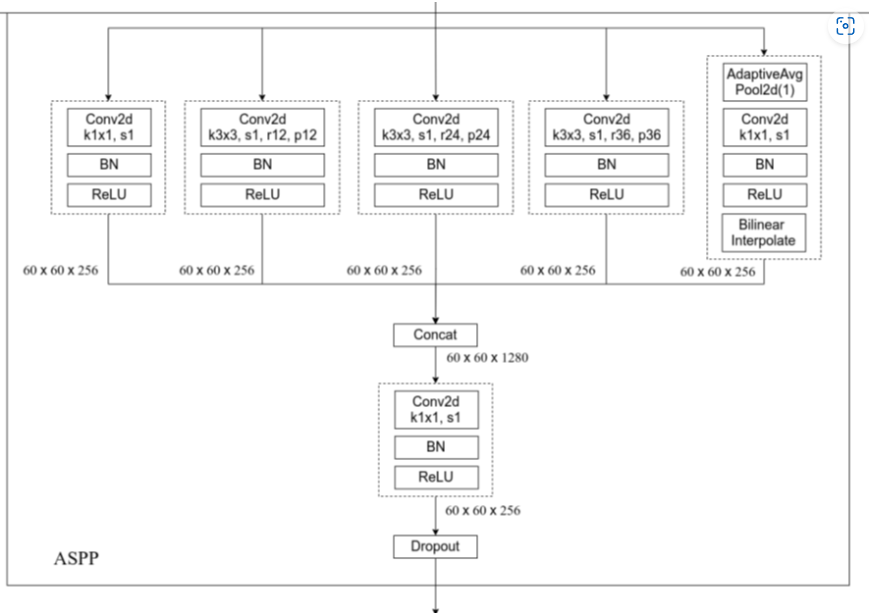
ASPP model(V3)
为了水论文而水。。。
核心:多尺度空洞卷积并行处理
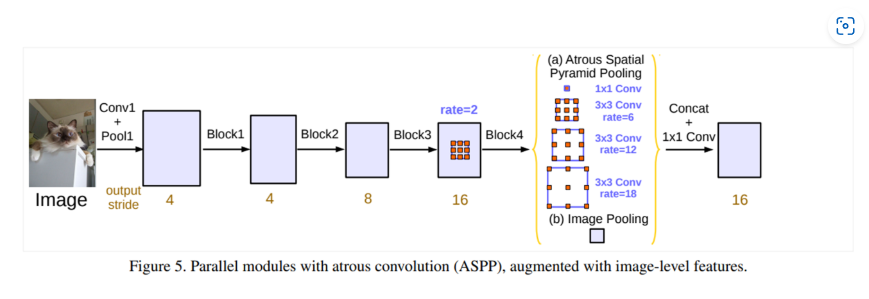
输入为backbone的输出,也就是特征图
五个尺度:
- 卷积
- 膨胀系数为的卷积
- 膨胀系数为的卷积
- 膨胀系数为的卷积
- 全局池化
最后进行channel上的拼接,再通过的卷积层进行进一步融合
需要注意的是:
- 当下采样率设置为16的时候,上图的膨胀卷积的膨胀系数分别为6、12、18
- 当下采样率设置为8的时候,上图的膨胀卷积的膨胀系数分别为12、24、36(作者说要翻倍,我也不知道为什么)
poly
V2采用的学习率策略(炼丹炼上瘾了)
其中:
- :衰减强度系数,通常取0.9-2.0
- :当前步数
- :总步数
RCNN
用于目标检测呀!
Backbone使用的是VGG16
总体来说分为4步(非常慢,很耗时,因为不是端对端网络,要分别训练多个网络):
- 一张图像生成1k~2k个候选区域
- 对每个候选区域,使用深度网络提取特征(前面说的分类网络本质上都可以)
- 深度网络输出的特征向量送入SVM进行分类
- 使用回归器精细修正侯选位置
非极大值抑制(NMS)剔除重叠建议框
- 寻找得分最高的目标,也就是经过SVM分类器之后概率最高的
- 计算其他目标与得分最高的目标的IoU值
- 删除所有IoU值大于给定阈值的目标
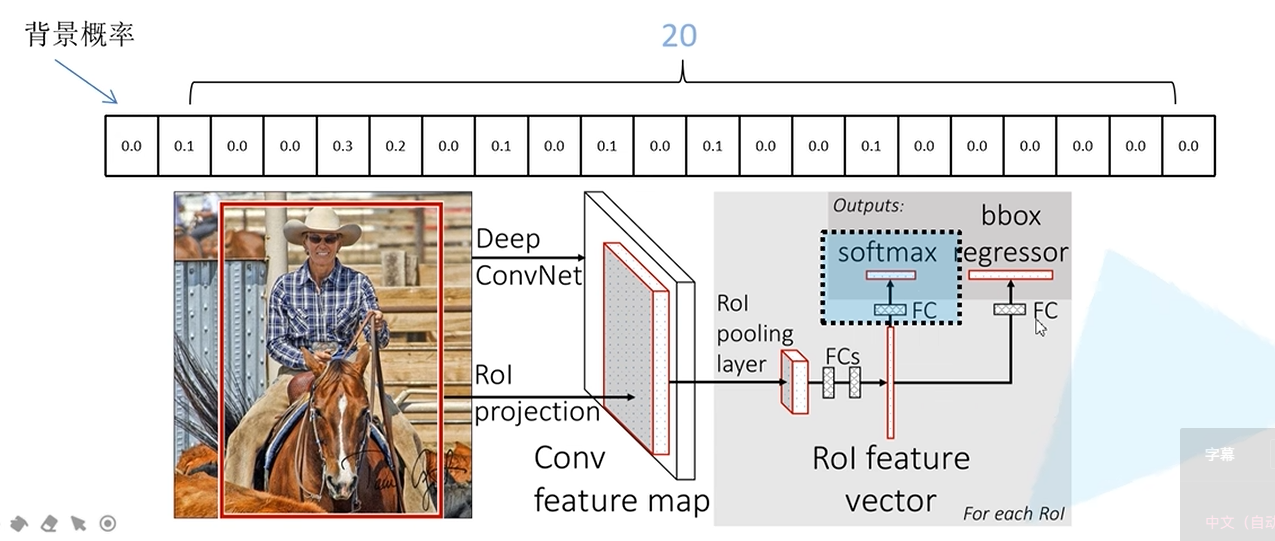
Fast R-CNN
Backbone使用的是VGG16
工作步骤
- 一张图像生成1k~2k个候选区域
- 将图像输入网络得到特征图,通过SS算法将生成的候选框直接投影到特征图上获得相应的特征矩阵
- 将每个特征矩阵通过ROI pooling层统一缩放到大小的特征图,将特征图展平通过一系列全连接层得到预测结果
- 有两个输出通道,并联两个全连接层
- 其中一个全连接层用于边界框回归参数的预测,另一个用于目标概率的预测(会输出N+1个类别的概率,N为检测目标的种类,1为背景)
从SS算法提供的区域进行正负样本采样解决数据不平衡的问题,原论文中提出只要候选框和真实的目标框的IoU大于0.5就是正样本
边界框回归参数的预测
全连接层会输出个回归参数
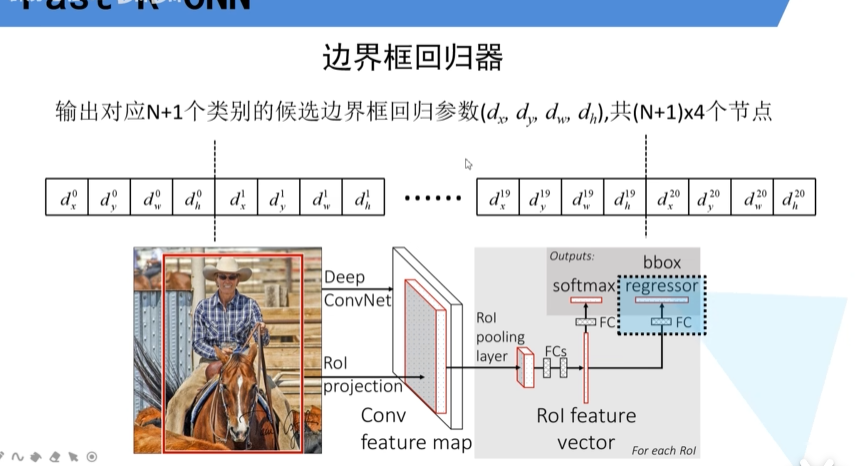
然后候选框进行参数更新
其中:
- 分别是候选框的中心坐标,以及宽高
- 为最终预测的边界框的中心坐标,以及宽高
Multi-task loss
损失函数
其中:
- 是分类器预测的softmax概率分布
- 对应目标真实类别标签
- 对应边界框回归器预测的对应类别的回归参数
- 对应真实目标的边界框回归参数
- 是艾佛森括号
- 为1才有边界框回归损失
- 为0说明预测的是背景,无需移动边界框
分类损失
这是因为真实类别目标标签是一个单热编码,最后只有真实标签不为0
边界框回归损失
真实目标框回归参数的计算
其中:
- 分别为真实目标框的中心坐标,以及宽高
- 计算这个参数是为了计算损失
ROI pooling
- 输入图像后经过特征提取,得到特征图
- RoI区域映射到特征图上(映射:与ROI在原图上的位置相对应)
- 将映射后的区域划分成多个部分,部分的数量与目的输出的维度有关,保证输出的特征维度统一
- 对每个部分进行max pooling操作
Faster R-CNN
还tm是何kaiming
核心:RPN + Fast R-CNN
- 一张图像生成1k~2k个候选区域
- 将图像输入网络得到特征图,通过RPN网络将生成的候选框直接投影到特征图上获得相应的特征矩阵
- 将每个特征矩阵通过ROI pooling层统一缩放到大小的特征图,将特征图展平通过一系列全连接层得到预测结果
RPN(Region Proposal Network)
核心任务:生成高质量的候选框
RPN网络的输入是Backbone提供的特征图
然后进行锚点生成和滑动窗口,再把卷积核的中心坐标映射回原来的特征图
锚点生成:在每个映射得到的原图中心坐标上,预设k个不同尺度和长宽比的锚点框(默认k=9)
- 例如:尺度为
[128, 256, 512],长宽比为[1:1, 1:2, 2:1]
- 例如:尺度为
滑动窗口:通过卷积对每个位置进行滑动,输出该位置的区域特征,通常是一维向量,这取决于Backbone输出的通道数(256-d或者其他维度)
映射:用原图的尺寸除以特征图的尺寸并取整得到步距,用特征图的坐标乘以这个步距得到原图坐标
对于每个锚点,RPN通过两个的卷积层并行输出
分类分支
- 预测锚点是前景或者是背景的概率(2k个输出),用sigmoid或者softmax
回归分支
- 输出4k个参数,表示锚点需要的偏移量,帮助锚点移动至高质量的候选框
正负样本采样
RPN网络会在对所有图像生成的非常多个anchor进行正负样本采样,总数一般为250,正负样本比为1:1
- 正样本:与任意**真实框(最终目标框)**的IoU大于0.7或者是与某个真实框有最大IoU(小于0.7)的anchor
- 负样本:与所有真实框的IoU小于0.3
RPN网络会对一张图像生成的非常多的anchor**(如2w个)保留下高质量的候选框(如2k**个)作为Fast-RCNN的输入,由其输出准确的目标框
RPN Multi-task loss
其中:
表示第i个anchor预测为真实标签的概率
当正样本时为1,负样本时为0
表示预测第i个anchor的边界框回归参数
表示第i个anchor对应的真实目标框回归参数
表示一个mini-batch的所有样本数,也就是一张图像采样的正负样本的总数
表示anchor位置的个数,即特征图的长和宽相乘
是前文提到的函数
是交叉熵损失
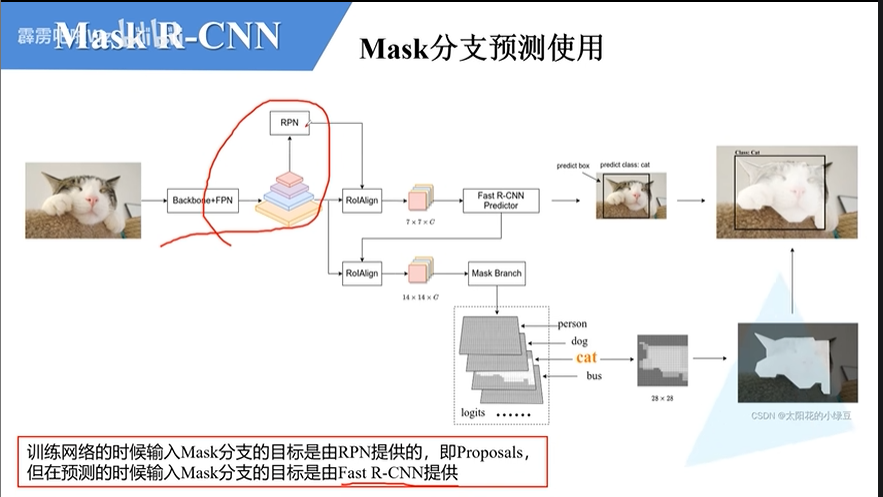
Mask R-CNN
能同时用于目标检测和实例分割,相对于Faster R-CNN加入了mask分支,改进ROI Pooling为ROI Align
Mask分支和Faster R-CNN分支并不共用一个ROI Align
损失函数:其实就是BCE-Loss
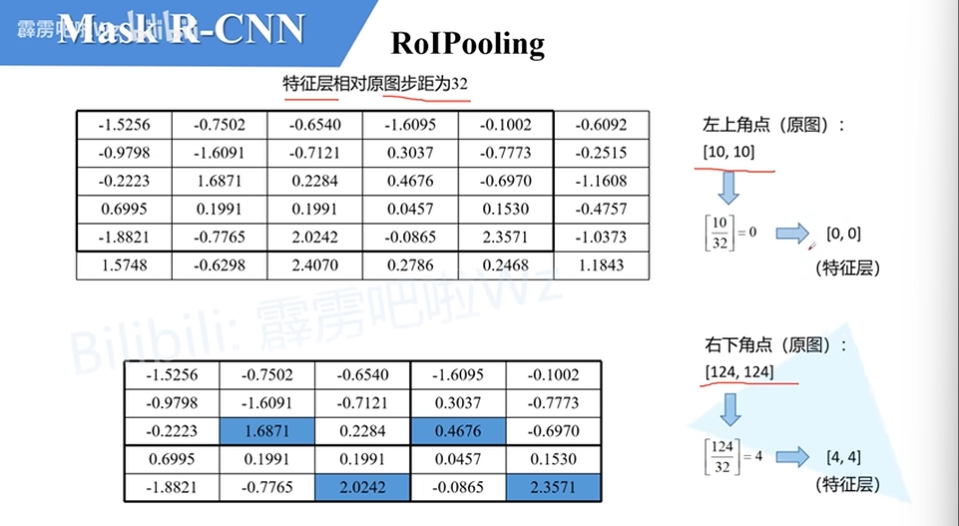
ROI Align
是ROI Pooling的改进
为何要改进?
- ROI pooling涉及两次取整操作,精度会有所损失,预测性能不佳
- 第一次取整在原图下采样至特征图这一过程
- 第二次取整在将特征图划分区域,maxpooling为统一尺寸这一过程
ROI Align工作流程
- 在原图下采样至特征图这一过程不进行取整,得到一个锚框
- 将得到的锚框进行均分,也不涉及取整
- ROI pooling是对每个子区域进行最大池化,ROI Align通过在每个区域进行采样得到每个区域的输出(当采用多个采样点时,每个子区域的输出取所有采样点的均值)
- 找出每个区域的中心点,找离它最近的四个像素点,使用双线性插值法对采样点数值进行计算
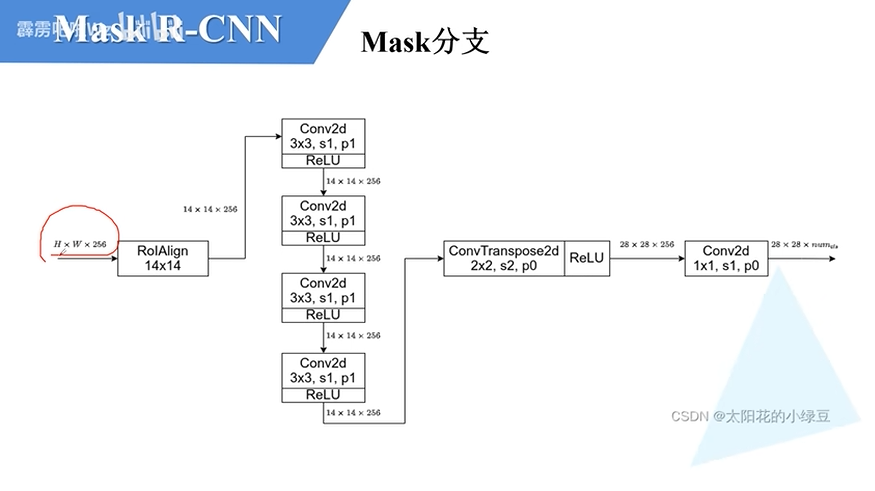
Mask分支
具有FPN结构的Mask分支
注意:
- 训练的时候输入Mask分支的目标是由RPN提供的,即Proposals(高质量候选框),且全是正样本
- 输入mask分支进行预测,用sigmoid把像素值进行归一化,前景像素值为1,背景像素值为0,然后使用BCE计算损失
- 输出的蒙版是小尺寸的,计算损失时要将原图进行裁剪成与输出蒙版相同尺寸
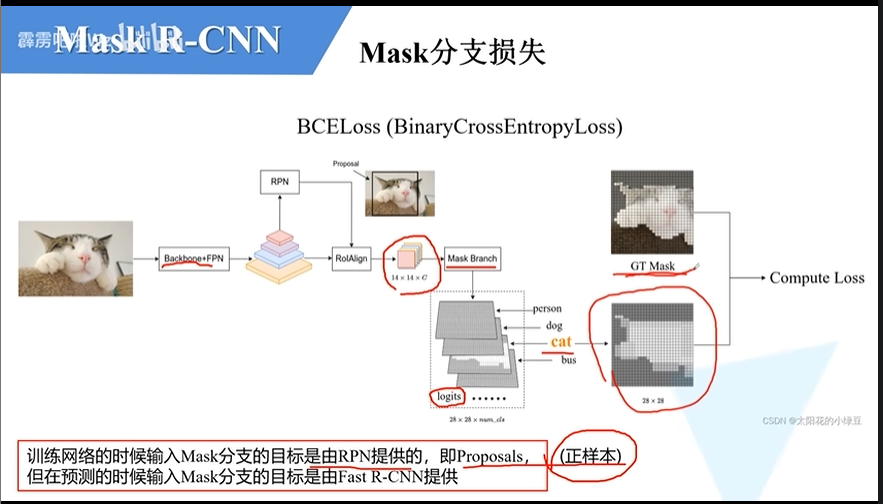
- 预测的时候输入Mask分支的目标是由Faster R-CNN提供的
- mask分支输出的预测结果要经过上采样还原回原图大小
通过这个分支可以为每个目标预测一个二值掩码,在像素级别上精确跟踪目标
在Mask R-CNN中,对预测mask以及class进行解耦
- 不在通道维度上进行softmax,否则一个类别分数高,另一个类别分数低,会存在竞争关系
- 对每个类别预测一个蒙版,对预测mask以及class进行解耦
- 用sigmoid,对每个像素预测属于前景和背景的概率,输出蒙版
YoloV5
Backbone采用了DarkNet
YoloV7
YoloV8
Clip
Blip
其它知识点补充
上下采样指的是图像分辨率的变化,而不是通道数的变化
消融实验是逐步移除或修改模型的某个组件(如模块、层、技术等),观察性能变化,从而量化该组件对模型整体的贡献
COCO格式数据集
COCO格式的数据集可以通过pycocotools.coco的COCO类进行加载,需放入annotations的json文件进行加载。
初始化后的实例有以下功能
| 方法 | 作用 | 示例 |
|---|---|---|
.getImgIds() | 获取所有图像ID列表 | train_coco.getImgIds() |
.loadImgs(ids) | 加载指定ID的图像元信息 | train_coco.loadImgs([1,2]) |
.getAnnIds(imgIds=[]) | 获取指定图像的标注ID | train_coco.getAnnIds(imgIds=[1]) |
.loadAnns(ids) | 加载指定ID的标注详情 | train_coco.loadAnns([1,2]) |
.annToMask(annotation) | 将多边形标注转为二值掩码 | |
.showAnns(annotations) | 可视化标注(需配合matplotlib) |
Focal Loss
何kaiming提出,主要应用于目标检测中数据样本极度不平衡的情况。
提出的原因
在目标检测中,需要预先产生大量锚框,如果正负样本采样策略不正确,数据会出现正负样本数据量极度不平衡的问题,会导致某一类数量较多的样本占据损失函数的较大部分,主导梯度,从而导致模型错判,下面举个例子
假设有个二分类问题,损失函数如下
假设有2个正样本,98个负样本,初始预测概率为0.5,损失分别为
当模型把预测概率降低为0.1时(更倾向于预测负样本)
这样模型会认为预测负样本可以最小化损失函数,模型也因此错判
Focal Loss
公式如下
- 用于平衡正负样本的重要性,但无法区分难易样本
- 当很小时(样本难分),调节因子趋近于1,对应样本的损失函数权重不受影响,反之,损失函数权重下降很多
- 聚焦参数可以调节易分类样本权重的降低程度
- 降低了易分类样本的权重,聚焦在难分类样本上