大模型训练过程
- 预训练
- 目标:学会语言本身,语言的通用表示,进行语言建模
- 方法:自监督学习
- SFT(有监督微调):何使用标注数据对预训练模型进行监督训练的过程
- 目标:让模型遵循指令,能够理解人类提出的问题
- 方法:监督学习
- 通常有全参微调,LoRA微调,Adapter微调等,指令微调也是SFT的一部分
- RLHF(人类反馈强化学习)
- 目标:让模型更符合人类的偏好,贴近人类意图
- 方法:强化学习
- 增强与扩展
- 蒸馏,微调,迁移学习等
SFT(Supervised Finetune)
主要任务是数据收集与标注,标注数据的质量和数量对微调效果至关重要
数据生产工作不完全是dirty work,数据质量直接决定模型微调后性能的好坏
数据方面有以下几点要阐述的
Few-Shot Prompting 是一种通过提供少量示例(通常1-5个)来引导模型生成符合任务要求的输出的技术
Seed Prompt 是为特定任务类型(
task_type)预先设计的指令模板,用于明确任务目标、输入输出格式及上下文约束数据多样性
- 数据质量和多样性比数据数量更为重要
- answer是尽量不要出错,需要大量人工筛查
- task_type 的划分就是sft数据最重要的基建工作,没有之一
数据生产
- 生产prompt
- 给每个task_type(任务类型分类)准备一些seed prompt,然后随机采样seed,喂给一个很强的pretrain模型,让他基于这些seed再续写出一些问题或者prompt
- 生产answer
- 不在乎成本,用GPT4/Claude3
- 在乎成本,Qwen_72B/deepseek_MoE
- 生产prompt
引人深思的一段话

RL(Reinforcement Learning)
定义:基于智能体在复杂、不确定的环境中最大化他能获得的奖励,从而获得自主决策
核心目标:给定一个马尔可夫决策过程,寻找最优策略
经典的强化学习模型
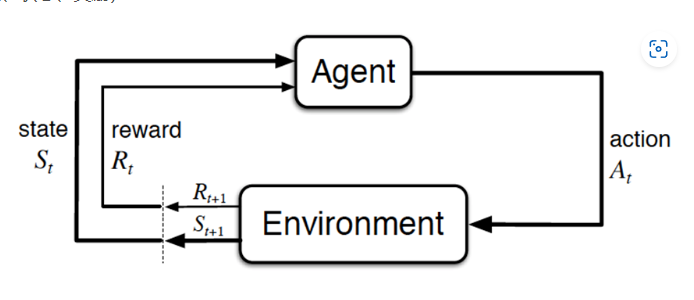
- Agent:智能体,就是我们要训练的模型
- action:行为
- Environment:环境,是提供reward的某个对象
- reward:奖赏,可以类比为在明确目标的情况下,接近目标意味着奖,远离目标意味着做的不好则惩,最终达到奖励最大化
- State:环境的状态
马尔可夫决策过程(MDP)
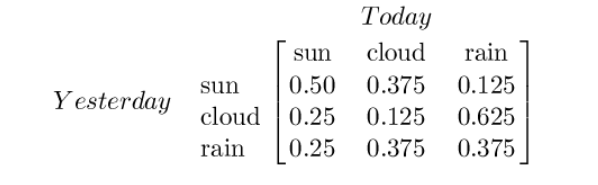
状态转移矩阵
假设有一类不确定的现象,假设今天是晴天,但无法百分百确定明天一定是晴天还是雨天、阴天
对于这种假设具有M个状态的模型
- 共有的状态转移,因为任何一个状态都有可能是所有状态的下一个转移状态
- 每一个状态转移都有一个概率值,相当于从一个状态转移到另一个状态的概率
- 所有个概率可以用一个状态转移矩阵表示
概率论的研究对象是静态的随机现象,而随机过程的研究对象是随时间演变的随机现象
- 随机现象在某时刻t的取值是一个向量随机变量,用表示
比如上述天气转移矩阵便如下所示
- 在某个时刻的状态通常取决于时刻之前的状态,将已知历史信息时下一个时刻的状态的概率表示成
- 当且仅当某时刻的状态只取决于上一时刻的状态时,一个随机过程被称为具有马尔可夫性质
具有马尔可夫性质的随机过程称为马尔可夫过程
- 是一个二元组,是有限状态集,是状态转移矩阵
马尔可夫奖励过程(MRP)
是一个四元组
:有限状态集
:状态转移概率矩阵
:奖励函数
- 也就是状态转移概率加权和
- 表示从状态到状态的收益
- 取均值是因为状态并非固定,从到下一个状态有多种可能,要取这多种可能的均值
:折扣因子/衰减系数
回报(Return):是从时间t开始的总折扣奖励
- 表示所有奖励在当前的价值,量化一个策略的长期表现
- 设置衰减系数的原因:保证回报的收敛
值函数:表示一个状态的长期价值
- 是对回报的期望
- 状态s后面的状态都是未知的,也就是有多个状态路径可以选择,值函数就是对这多个状态路径的回报取了均值
MRPs的贝尔曼方程
由下述式子可以推出
也就是
马尔可夫决策过程(MDP)
马尔可夫决策过程是一个五元组
:有限状态集
:动作集
:状态转移概率矩阵
:奖励函数
- 也就是状态转移概率加权和
- 表示从状态执行动作到状态的收益
- 取均值是因为状态并非固定,从到下一个状态有多种可能,要取这多种可能的均值
:折扣因子/衰减系数
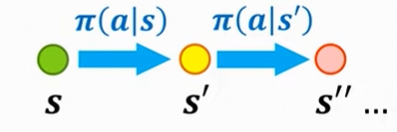
策略
是给定状态的动作分布,
- 是一个随机变量,表示在状态s前提下作出动作a的可能性
- 完全决定智能体行为
- MDP策略依赖于当前状态**(无关历史),且无关时间**
给定一个马尔可夫决策过程和策略,其可转化为马尔可夫过程和马尔可夫奖励过程
- 也就是通过加权求和把动作的维度消除,减少运算量
- 第一个可以理解成从状态可以使用多个动作到状态,这里对其使用了加权求和
- 第二个也同理,加权求和,消除动作的维度
状态值函数
表示在状态s下,遵循策略的期望回报
回报的表达式
可以得到状态值函数的贝尔曼期望方程
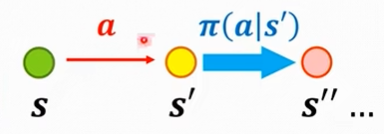
动作值函数
表示在状态s下执行动作a后,遵顼策略的期望回报
同上推导,可以得到动作值函数的贝尔曼期望方程
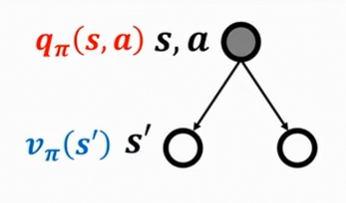
将动作值函数和状态值函数联系起来
某一个状态的价值可以用该状态下的所有动作的价值表述
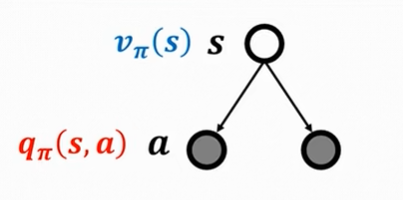
某一个动作的价值可以用该状态后继状态的价值表述
贝尔曼最优方程
最优状态值函数
最优动作值函数
最优策略
- 存在一个最优策略,使
- 所有最优策略都能取得最优状态值函数
- 所有最优策略都能取得最优动作值函数
- 最优策略本质上是一个具体的动作链,而不是分布
注:若,则
由上述定义可以写出贝尔曼最优方程
状态值函数的贝尔曼最优方程
首先根据
和
写出:
下面来推导贝尔曼最优方程(动态规划方法)
从状态值函数的贝尔曼方程出发
最优策略必须在每个状态s选择最大化
- 最优策略一定满足
- 也满足
- 最大化等价于最大化
因此,最优状态值需要满足:
代入动作值函数
最后得出状态值函数的贝尔曼最优方程
动作值函数的贝尔曼最优方程
同上,写出:
要最大化动作值函数的贝尔曼方程,就是要最大化,即
代入,得到动作值函数的贝尔曼最优方程
LLaMA
与GPT类似,LLaMA也只使用了Transformer的解码器,即Decoder-only架构,且目前主流的语言大模型都采用了这个架构
- 只训练了单一模块,效率高
- 采用掩码注意力实现双向编码和单向生成的兼容
- 自回归任务天生适应
RMSNorm
通过计算输入的张量的均方根实现归一化
公式如下
其中:
- 是输入向量
- 是输入向量的维度
- 是一个小常数,避免除零错误
- 是一个可学习的缩放参数
SwiGLU
是一种用于神经网络的激活函数,结合了Swish激活函数和门控机制的特点
Swish激活函数
- 为Sigmoid函数
GLU激活函数
- 为逐元素相乘
- 为权重矩阵,为偏置项
SwiGLU激活函数
符号寓意同上
优势:
- 平滑非线性:Swish函数的平滑性可以缓解梯度消失
- 门控特性:GLU的门控机制允许模型动态调整信息流
RoPE
提过,不说了,在其它笔记里有
GQA
在LLaMA2、3中使用
具体理论在下面
GPT
Deepseek
MLA(多头潜在注意力)
下面说了,不再赘述
分布式训练
为何要进行分布式训练?
- 模型太过庞大,一个GPU放不下
- 用多张GPU加速模型训练
有哪些分布式训练框架?
- DP(Data Parallel)
- DDP(Distributed Data Parallel)
- FSDP(Fully Sharded Data Parallel)
All-Reduce(全局制约)
- 目标:所有进程(GPU)都得到相同结果,该结果是所有进程输入数据的聚合
- 操作流程
- 输入:每个GPU有一个本地数据
- 数据交换:对所有GPU的数据执行某种操作(如
SUM、MAX) - 输出:所有GPU得到完全相同的聚合结果
All-Gather(全局收集)
目标:所有进程(GPU)收集其它所有进程的数据,最终每个GPU拥有完整的数据拼接(不聚合)
操作流程
输入:每个GPU有一个本地数据块
数据交换:所有GPU互相广播自己的数据块
输出:所有GPU得到所有数据块的完整拼接
数据并行
DP(Data Parallel)
单进程多线程,Python GIL(全局解释器锁)只能利用一个CPU核
工作流程
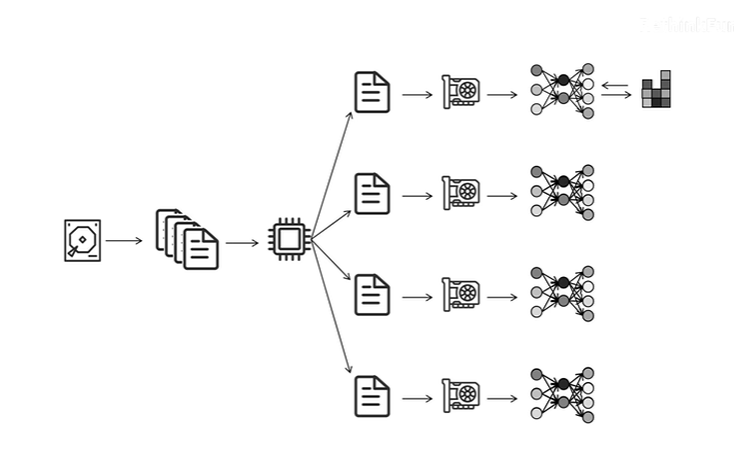
- 用CPU将数据分成多份,给每个GPU一份
- 每个GPU独自进行训练,将自己计算的梯度传递到GPU0上
- GPU0用全局平均梯度更新自己的网络参数
- 将更新后的参数广播到其它GPU上
通信分析
假设参数量位,节点数为
- 对于GPU0,传入梯度为,传出参数为
- 对于其它GPU,传出梯度为,传入参数为
问题
- 单进程,多线程,Python GIL只能利用一个CPU核
- GPU0负责收集梯度,更新参数,广播参数,计算压力大
DDP(Distributed Data Parallel)
生产环境常用,多进程多线程
- 执行多个相同的py脚本,但用rank进行不同脚本的区分,也就实现了多进程
- 注意的是通讯成本比计算成本大
工作步骤
- GPU0加载模型,并把模型同步到其它GPU
- 按照神经网络参数定义反序,把参数进行排列,即输出层在最前面,输入层在最后面
- 对每个参数注册一个监听器,将这些监听器按顺序放到一个个桶里
- GPU在进行计算的同时进行传输,先计算出来的梯度先进行同步
- 当多个GPU的同一个桶的梯度都计算完成后,就进行Ring-AllReduce的梯度同步
- 所有的桶都计算完毕后,每个GPU调用他们各自的优化器进行参数更新
通讯分析
假设参数量位,进程数为
对于每个GPU进程
- Scatter-Reduce阶段传入/传出:
- All-Gather阶段传入/传出:
总传入/传出:,与集群大小无关
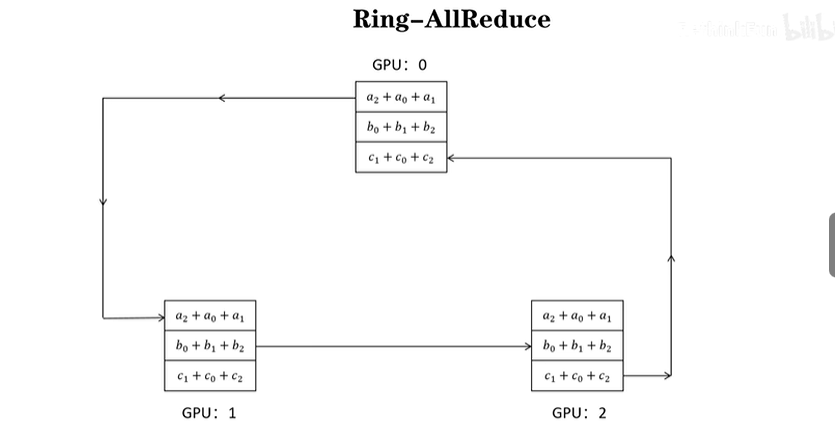
集群通信方式:Ring-AllReduce
- 将多个节点连成环进行通讯
- 具体就是每个GPU即在发送,也在接受数据
- 参数量除以总GPU个数就是一个GPU负责的块(也就是要同步的块)
工作流程:
Scatter-Reduce
- 假设有n块GPU,那么将数据划分为n块,然后开始执行n-1次操作
- 第i次操作,会将自己的第块数据发送给,并接收的第块数据
All-gather
- 将各个参数梯度求和值同步到其它GPU
- 第块GPU的第块数据传递给其它GPU
- 在第次传递时,把自己的第块数据发送给自己的右邻居,同时接受左邻居的第块数据
FSDP(Fully Sharded Data Parallel)
核心原理:
- 参数分片:对梯度、参数、优化器状态均匀拆分到各个GPU
- 按需通信:前向传播或者后向传播的时候依靠通信获取所需数据,使用完后立即释放
- 显存卸载:会将没用到的优化器状态或者参数从GPU显存卸载到CPU内存
DeepSpeed ZeRO-1
假设有3块GPU,使用混合精度训练,每个GPU都要存储以下东西

在GPU中,优化器状态占用大部分显存,ZeRO-1的出发点就是每块GPU只存储一部分优化器状态,存储了那部分优化器的状态就负责那几层网络的参数更新
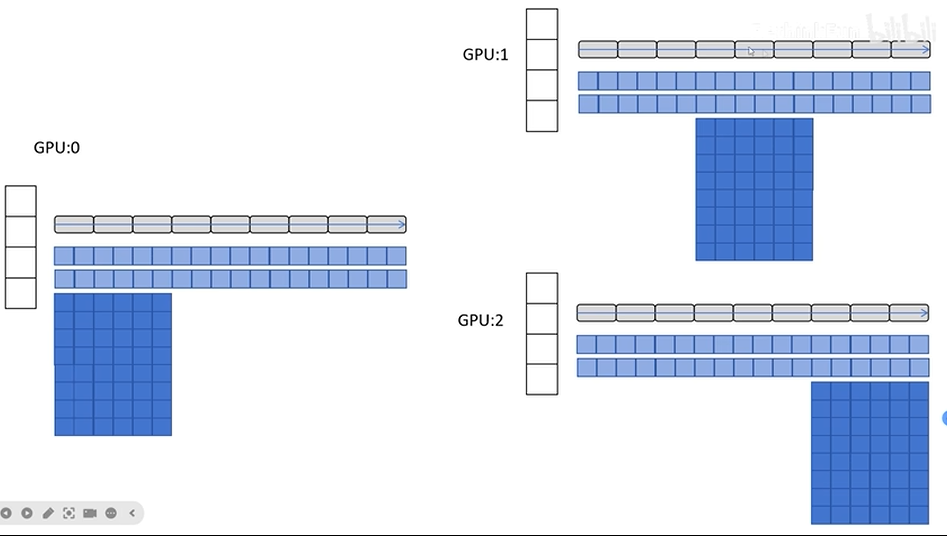
工作流程
- 进行前向传播
- 进行后向传播的同时,GPU0和GPU1把计算出来的梯度传给GPU2,让GPU2去更新网络参数,其它GPU同理
- 反向传播完毕后,每个GPU更新各自优化器的梯度、一阶动量、二阶动量、FP32参数和FP16网络参数、梯度
- 最后把FP16参数广播到每个GPU完成一次训练
通信量分析
假设参数量位,节点数为
对于每个GPU进程:
- 梯度收集阶段传入/传出:
- 参数广播阶段传入/传出:
总传入/传出:
DeepSpeed ZeRO-2
ZeRO-2中,把FP16的梯度也进行了划分,即GPU不再保存自己用不到的梯度
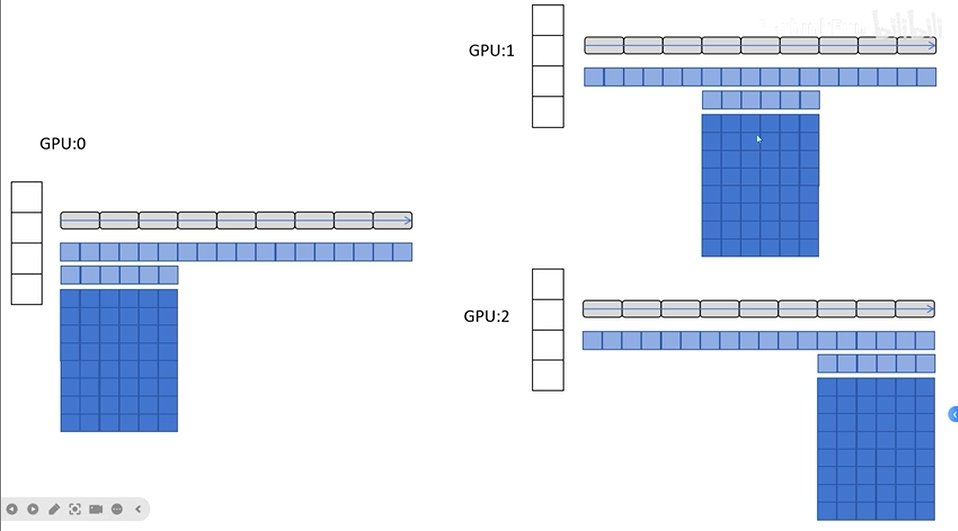
工作过程
- 进行前向传播
- 进行后向传播时,GPU0和GPU1计算出来梯度后,立即传递给GPU2,然后进行释放,其它GPU也同理
- 反向传播完毕后,每个GPU更新各自优化器的梯度、一阶动量、二阶动量、FP32参数和FP16网络参数、梯度
- 最后把FP16参数广播到每个GPU完成一次训练
通信量分析
假设参数量位,节点数为
对于每个GPU进程:
- 梯度收集阶段传入/传出:
- 参数广播阶段传入/传出:
总传入/传出:
DeepSpeed ZeRO-3
ZeRO-3对FP16参数也进行了划分
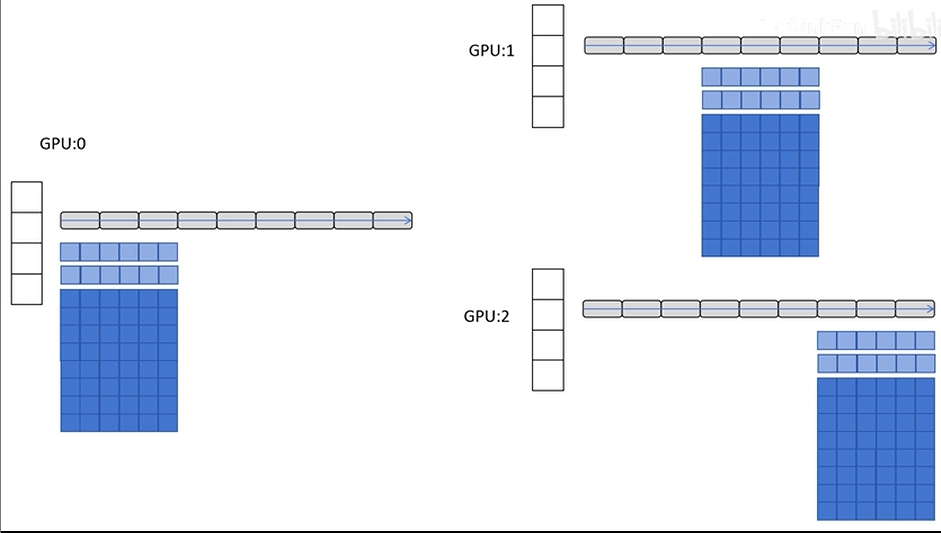
工作过程
- 前向传播,GPU遇到自己没有的参数,靠其它GPU来进行广播,计算完后立即释放,不占用显存
- 反向传播同样要用到参数,这时候需要利用广播获取参数,使用完参数后立即释放
- 每个GPU利用优化器进行参数更新,每个GPU仅更新自己分区的参数
- 最后把参数进行广播,完成一次训练
通信量分析
假设参数量位,节点数为
对于每个GPU进程:
- 梯度收集阶段传入/传出:
- 参数广播阶段传入/传出:
总传入/传出:
模型并行
张量并行(TP)
核心原理:将模型中的张量进行拆分然后分配到不同的GPU上
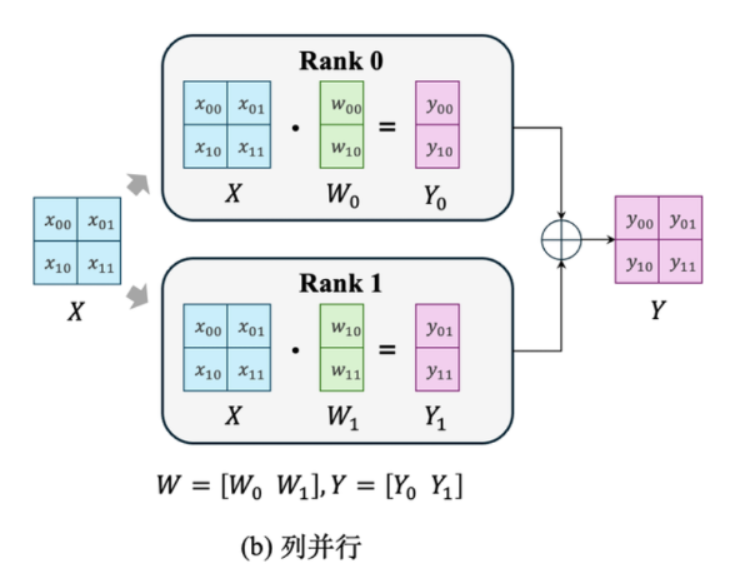
列并行
将权重矩阵按列进行切分
假设有
其中:
可以看成
然后按列进行分割,分配到两块GPU上进行计算
接着
然后进行拼接
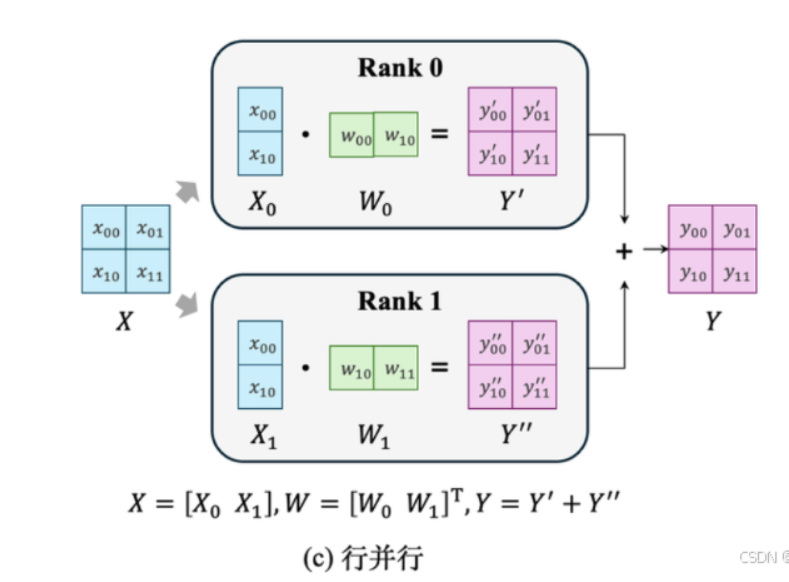
行并行
将权重矩阵按行进行切分
假设有
其中:
可以看成
然后按列进行分割,分配到两块GPU上进行计算
此时也要进行切割
接着进行计算
最后把和进行相加得到最终输出
流水线并行(PP)
本质上是层间并行,将模型的不同层分发到不同的GPU上
朴素流水线并行
- 将模型按照层间切分成多个部分(Stage),并将每个部分(Stage)分配给一个 GPU
- 对小批量数据进行常规的训练,在模型切分成多个部分的边界处进行通信
工作流程
- 模型进行前向传播,到边界处把结果张量传递给GPU2
- GPU2计算得到模型的输出
- 进行反向传播,反向传播至边界处将梯度发送给GPU1,GPU1继续进行反向传播
存在的问题
- GPU利用率低,在任意时刻只有一个GPU工作
- 计算和通信没有重叠
流水线并行策略
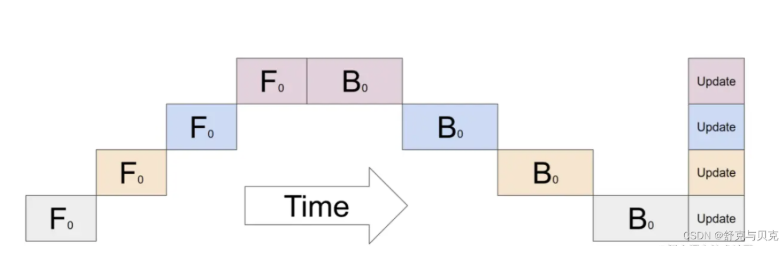
F-then-B策略
- 先进行前向计算,再进行反向计算
- 具体来说就是前向计算完一个mini-batch,再反向传播这个mini-batch
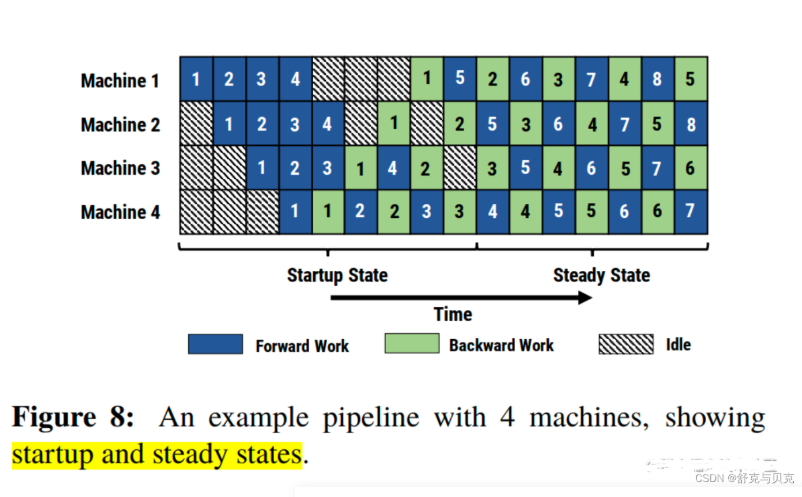
1F1B策略
- 前向计算和反向计算交叉进行,可以释放不必要的中间变量
- 示例如下图所示,以 stage4 的 F42(stage4 的第 2 个 micro-batch 的前向计算)为例,F42 在计算前,F41 的反向 B41(stage4 的第 1 个 micro-batch 的反向计算)已经计算结束,即可释放 F41 的中间变量,从而 F42 可以复用 F41 中间变量的显存
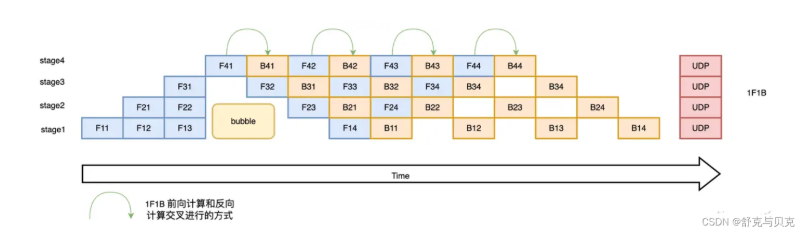
- 显存占比明显下降
Gpipe流水线并行
谷歌提出的流水线并行,使用的是F-then-B策略
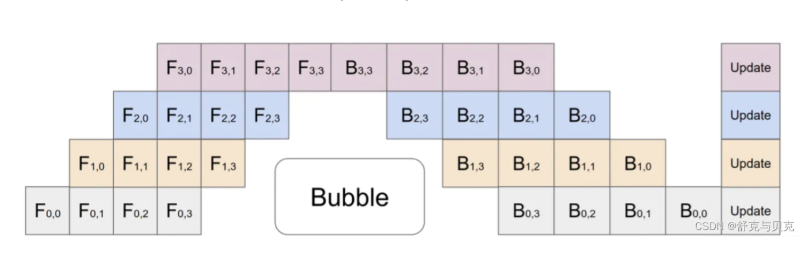
核心:它把一个Mini-bacth,拆解成更小的Micro-batches,比如上图的把一个Mini-batch,拆成4个Micro-batches
好处:当前向计算的第一个Micro-batch1被GPU0计算完毕,它就会传递到模型的下一层GPU1,然后GPU0可以继续计算Micro-batch2
坏处:对于那些需要统计量的层(如:Batch Normalization),就会导致计算变得麻烦,需要重新实现。在Gpipe中的方法是,在训练时计算和运用的是micro-batch里的均值和方差,同时持续追踪全部mini-batch的移动平均和方差,以便在测试阶段进行使用
PipeDream --- DeepSpeed
微软提出的流水线并行策略,非交错式1F1B
Gpipe的流水线有以下问题:
- 将mini-batch切分成m份micro-batch之后,会带来更频繁的流水线刷新(当GPU流水线并行训练时出错进行检查点重载)
- Pipeline Flush(流水线刷新)是流水线并行系统中的一种重置操作,其本质是:
- 丢弃所有未完成的计算(半成品微批次)
- 释放被占用的计算/通信资源
- 回滚到最近的安全状态(如检查点)
- Pipeline Flush(流水线刷新)是流水线并行系统中的一种重置操作,其本质是:
- 将mini-batch切分成m份micro-batch之后,需要缓存m份激活值,会导致内存增加
PipeDream具体方案如下:
- 一个阶段做完一次micro-batch的前向传播之后,就立刻进行mirco-batch的后向传播,然后释放内存
- 如下图所示,machine1先执行micro-batch的forward,然后把激活值传给machine2,以此类推
- 从machine4进行反向传播,逐步传递梯度至machine1,然后逐渐进入稳定状态(1F1B)
- 斜线的方块就是Bubble,也就是GPU的空闲时间
问题:
- 当前向传播的5号Micro-batch在Machine1上就开始传递的时候,实际上它使用的权重是Micro-batch 1做完了反向传播之后更新的权重,此时FW2-4并没有进行更新
- 如果 Micro-batch 5 的前向计算使用了 最新版本的权重(即 Micro-batch 1 反向更新后的权重),而 Micro-batch 5 的反向计算又使用了 更晚更新的权重(如 Micro-batch 4 反向更新后的权重),就会导致梯度计算不一致,影响训练稳定性
- 同理,Machine2上FW5又是在batch1-2做完反向传播后进行更新的,而Machine1是在做完了batch1的反向传播后进行更新的,Machine1和Machine2的权重又起了冲突
解决方法:
在1F1B的基础上,PipeDream引入了Weight stashing和Vertical Sync两种技术来矫正权重的冲突和同步
- Weight stashing(权重暂存):为权重维护多个版本,每个 Micro-batch 的前向计算所使用的权重会被暂存,并在其反向计算时复用
- 具体流程:
- 前向计算时:Machine 1 使用 当前最新版本的权重 计算 Micro-batch 5 的前向结果,并 保存该版本的权重(记为 W₅)
- 反向计算时:Machine 1 在计算 Micro-batch 5 的反向传播时,使用之前暂存的 W₅,而不是最新的权重
- 参数更新:反向传播完成后,梯度更新仍然作用于最新版本的权重(即 W₅ 的梯度会更新到当前最新的权重上)
- 具体流程:
- Vertical Sync(垂直同步):每个 Micro-batch 进入流水线时,会记录当前最新版本的权重,并在整个生命周期(所有 Stage)中使用该版本
- 具体流程:
- Micro-batch 进入流水线时,Machine 1 会记录当前最新版本的权重(如 W₁),并 将该版本号传递给后续所有 Stage
- 所有 Stage 在处理该 Micro-batch 时,都使用 W₁,而不是各自的最新权重
- 梯度更新:反向传播完成后,梯度仍然更新到 最新版本的权重(即 W₁ 的梯度会更新到当前最新的权重上)
- 具体流程:
问题解析
问题1:同一个微批次数据**,相同的device(相同stage),在前向计算和反向计算,采用**不同版本的模型参数
示例:
- Device 1 的微批次5数据,在前向传播使用了第1个版本模型(微批次1反向传播完成),
- Device 1 的微批次5数据,在反向传播使用了第4个版本模型(微批次1、2、3、4反向传播完成)

解决办法:Weight Stashing方法
每个device多备份几个不同版本的权重,确保同一个微批次数据,在前向计算和后向计算采用同一个版本的模型权重。计算前向传播之后,会将这份前向传播使用的权重保存下来,用于同一个 minibatch 的后向计算
示例:
- Device 1 的 微批次5数据, 在前向传播使用了第1个版本模型(微批次1反向传播完成)
- Device 1 的 微批次5数据, 在反向传播使用了第1个版本模型(微批次1反向传播完成)
问题2:同一个微批次数据,相同的操作(都是前向或者都是反向),在不同的device上(不同stage),采用不同版本的模型参数
示例:
- Device 1 的微批次5数据,在前向传播使用了第1个版本模型(微批次1反向传播完成)
- Device 2 的微批次5数据,在前向传播使用了第2个版本模型(微批次1、2反向传播完成)

解决方法:Vertical Sync方法
每个批次数据进入pipeline时都使用当前device(阶段)最新版本的参数,并且参数版本号会伴随该批次数据整个生命周期,从而实现了device(阶段)间的参数一致性
示例:
- Device 1的微批次5数据,在前向传播使用了第1个版本模型(微批次1反向传播完成)
- Device 2的微批次5数据,在前向传播使用了第1个版本模型(微批次1反向传播完成)
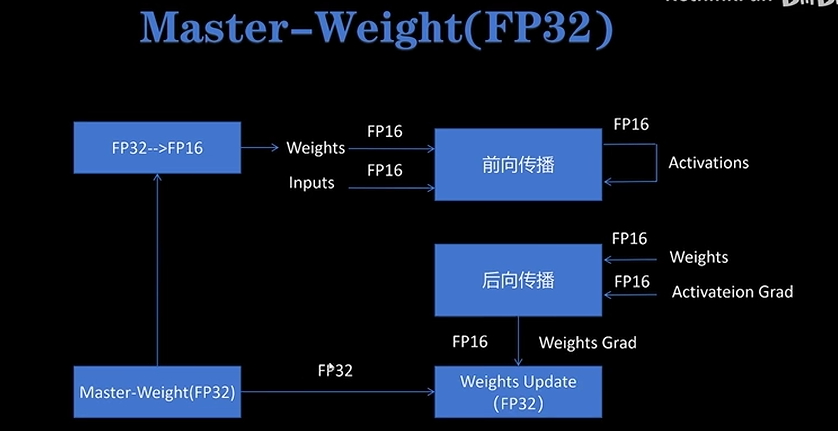
混合精度训练
大部分情况下,计算都是在float16下进行,但是优化器会保存一份float32的精度值(Master-Weight)
训练过程
- 将Master-Weight转换为fp16
- 和inputs一起进行前向传播、反向传播,存储的激活值也是FP16
- 梯度传入优化器,被转换为fp32用于参数更新
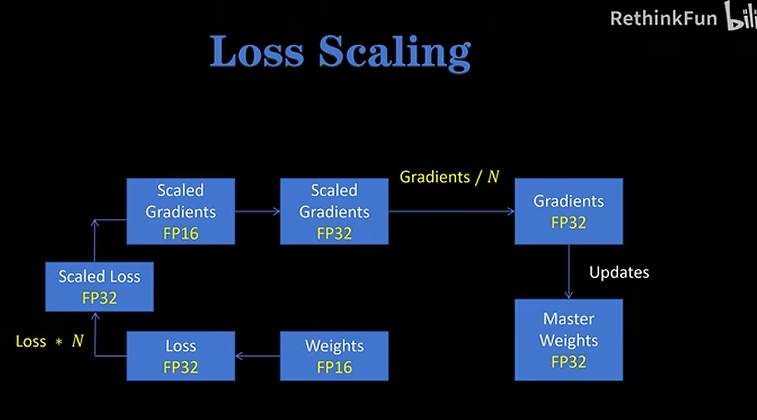
Loss Scaling
- 用fp16精度的权重进行前向传播计算损失,损失为fp32
- 然后进行损失缩放,得到fp32(缩放后)的损失
- 再把损失转换为fp16的梯度,进行反向传播梯度计算,接着转回fp32的梯度
- 再次进行缩放,得到fp32位的梯度,进行参数更新
将梯度进行放大,可以避开fp16的下溢区间(因为梯度一般来说都很小,会在FP16的下溢区间)
一般在线性层、卷积、RNN使用fp16,在累加过程中用fp32
浮点型的表示
将浮点数转换为二进制,再转换为科学计数法

各种精度
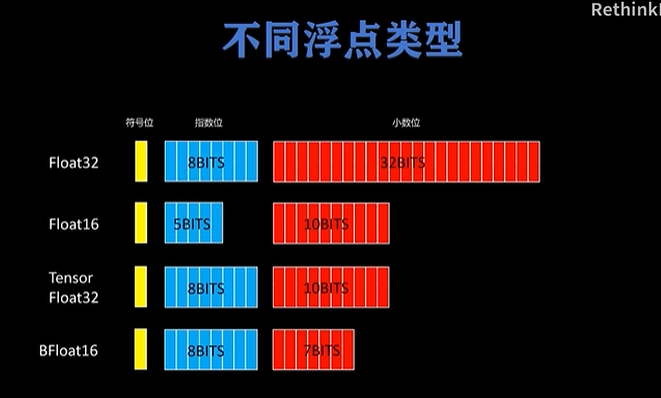
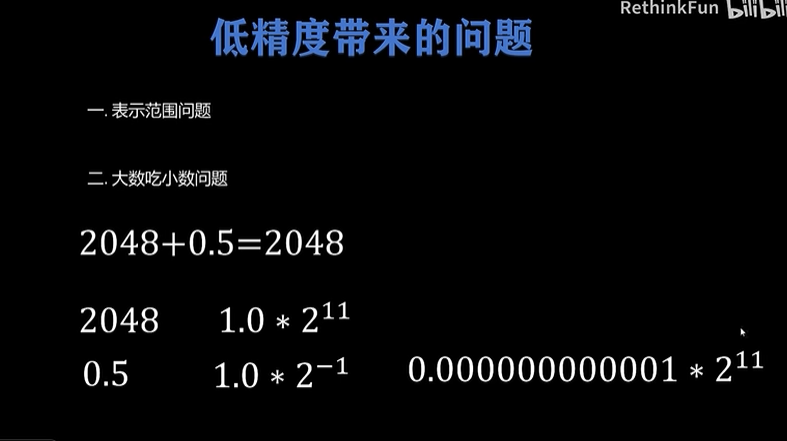
低精度带来的问题
- 表示范围有限
- 大数吃小数问题,大的数和小的数相加,小的数要转换为和大的数一样的指数表示,转换后的小数位太小,低精度无法表示,因此溢出
注意力机制变体
MHA、MQA和GQA
MHA
之前说过,不赘述
MQA(Multi-Query Attention)
多头查询注意力
原理:
将原生Transformer每一层多头注意力的key矩阵、value矩阵改为该层下所有头共享,即K、V矩阵每层只有一个,Q矩阵不受影响。
在同一层的注意力机制中,多个头共享相同的K、V矩阵
层内KV共享,而不是跨层共享
好处与坏处:
- 大幅度减少了参数量,推理得到了加速
- 但会造成模型性能的损失,且训练的时候模型不稳定
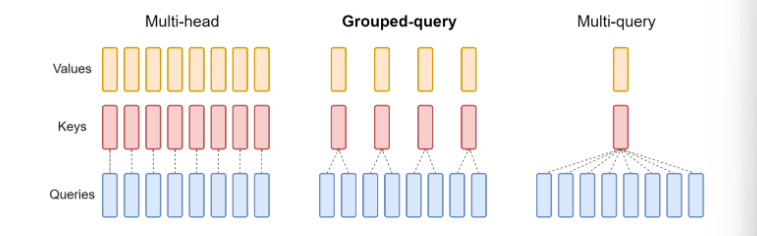
GQA(Grouped-Query Attention)
分组查询注意力
原理:
- 将Query进行分组,每个组内共享一组Key、Value
- 令组的个数为N,N=1时为MQA,N等于Query的数量则退化为MHA
好处:
- 通过分组减少模型性能损失,使推理性能接近MHA,同时也减少了参数量
MLA(Multi-Head Latent Attention)
多头潜在注意力,在Deepseek-V3中提出
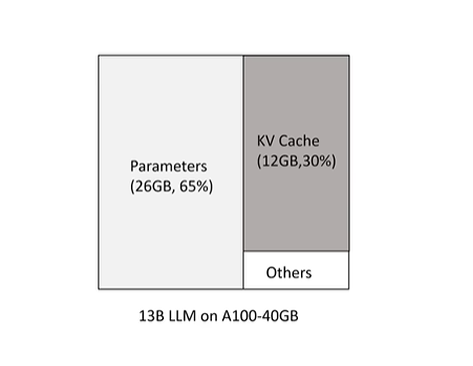
为何提出?
- KV Cache虽然加速了模型推理,但是占据了大量显存空间
- 上文提到的MQA和GQA虽然降低了KV Cache计算量(),但是性能损失太多
目的是什么?
- 降低推理过程中的KV Cache资源开销
- 缓解MQA,GQA对性能的损耗
怎么做的?
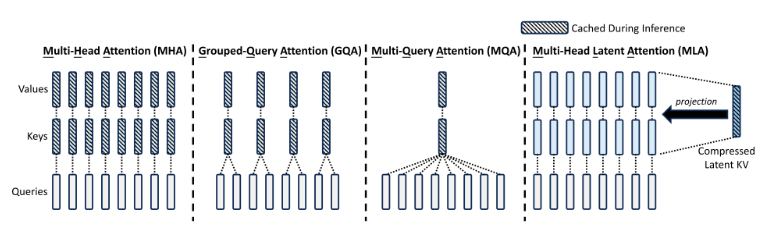
- 对Key和Value矩阵进行了一个低秩联合压缩(通过低秩转换为一个压缩的KV,使得存储的KV的维度显著减小)
- 如下图所示,阴影表示的是KV缓存,在MLA中的KV缓存是最少的
下面来看看怎么压缩的
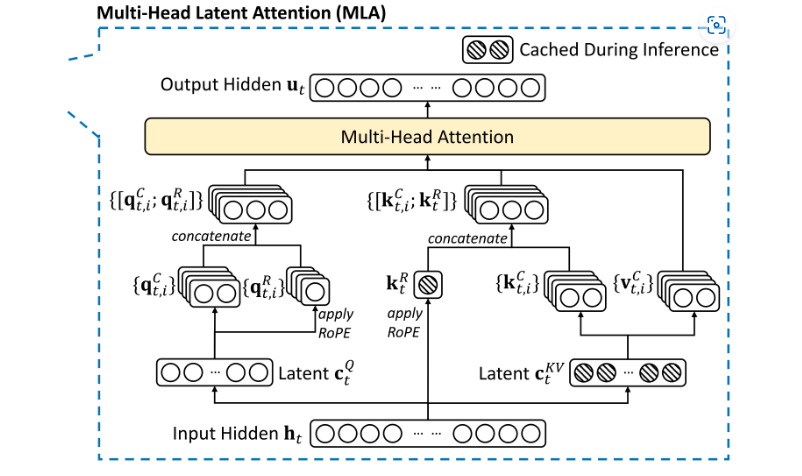
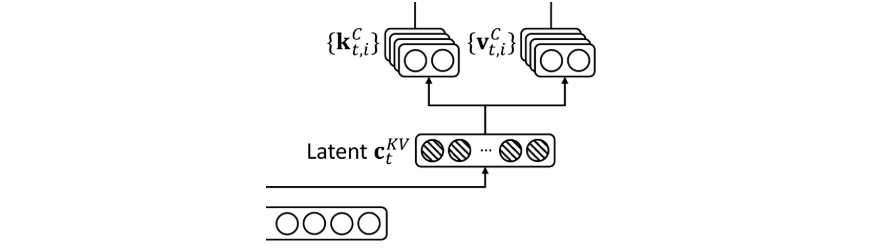
对Query和Key进行拆分,拆分为,,其中一部分做压缩,另一部分做RoPE编码
- 输入隐藏层状态
- 通过低秩分解生成
- 为KV潜在向量
- 为Q潜在向量
- 将Key和Value分成两部分
- 静态缓存部分:推理时缓存的低维 Key 和 Value。即
- 动态残差部分:补充压缩可能丢失的细节信息。即(直接通过输入的隐藏层获取)
- 同时对Query也分成两部分,一部分做压缩,一部分应用旋转编码(这里是先压缩再分成两部分的)
- 对Q、K、V的不同部分进行拼接,进行多头注意力计算
对KV进行联合压缩
三个变量分别通过如下三个公式得来
就是针对KV先一块降维,然后再分别升维
在推理的过程中,只需要缓存每一步的,然后再计算还原回原始的K、V即可
对Q压缩降维、再升维
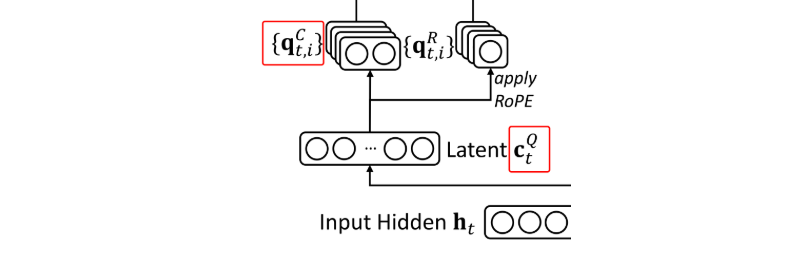
公式如下
这并不能降低KV Cache,但可以减少训练过程中的激活内存
MLA对Q和K的RoPE编码
MLA需要对和应用RoPE编码,但是RoPE与低秩压缩是不兼容的
- RoPE对Q和K的编码是动态的,因此在推理的时候,RoPE必须实时计算
- 如果对压缩后的应用RoPE,这就意味着旋转矩阵与低秩矩阵耦合,并且无法缓存,因为RoPE需要进行实时计算,KV Cache的优势丧失
- 且矩阵乘法不满足交换律,无法将吸收到其它权重中
原始注意力分数
它不等于
因为矩阵不满足交换律,也就无法将吸收到其它权重中
MLA通过对RoPE和进行**解耦!!!**来解决这个问题
- 静态缓存部分():
- 低秩压缩后的 K()不应用 RoPE,直接缓存
- 推理时只需存储低维 ,显存占用极低
- 动态 RoPE 部分():
- 从输入 动态生成,单独应用 RoPE
- 补充位置信息,避免与低秩矩阵的耦合
- 合并计算
- 最终,既保留了位置信息,又利用了KV Cache
MFA(Multi-matrix Factorization Attention)
多矩阵分解注意力
没博客和视频教啊!!!后面看论文吧
注意力机制加速
Paged Attention
内存优化
核心思想:将操作系统的内存分页思想引入显存管理,大幅度降低显存占用
首先要明确:
- GPU、CPU对连续内存的访问效率远高于非连续内存
- 频繁申请/释放GPU显存会让其显存变得零散,降低利用率
传统注意力计算的显存有三种类型的浪费
- 推理的时候是按照最大序列长度预分配显存的,如果输出的序列没这么长,会导致显存浪费
- 比如输出的序列是
我爱中国,模型输出最大序列长度是1024,那么预分配的显存就是1024个token,但输出序列只占了4个token,造成显存大量浪费
- 比如输出的序列是
- 大模型的推理是自回归任务,下一个token即使还未生成,显存已经为其预留好了,无法和其它生成任务并行
- 比如我这个任务要生成1000个token,现在生成到第5个token,此时有个新的任务只需要生成10个token,但后面995个token的显存已经被占用了,新任务无法分配到显存
- 显存利用碎片化,显存分配是随机的
- 已释放的显存空间不连续:显存占用情况:
[空闲500MB] [已占1GB] [空闲300MB] [已占2GB]。假设有一个任务占用500MB显存,现在任务完成将他释放,但是新任务需要600MB显存,没法为其分配连续的显存,报错 - 序列间的显存块太小:显存被多个并发生成序列分割占用,剩余的空闲块尺寸小于新请求所需的最小单位
- 已释放的显存空间不连续:显存占用情况:
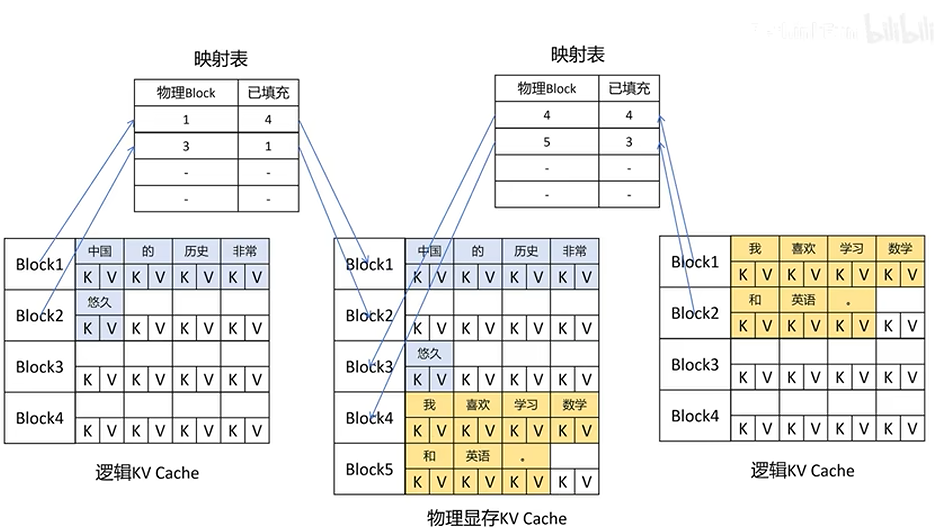
具体是怎么做的
- 分页存储:vLLM 启动时会预先分配一批固定大小的显存页,形成一个空闲页池
- 动态分配显存:每次生成都会预留一页token的显存,当生成新token的时候检查当前页是否用完,用完了就从空闲页池申请新页
- 逻辑表映射:分配显存的时候,每一页物理上是不连续的,但是Paged Attention通过维护一个逻辑页表将物理不连续的显存页映射为逻辑上连续的KV Cache
- 显存不足:会将不活跃的页换出到CPU,需要的时候再换回,或者尝试释放已使用完的页
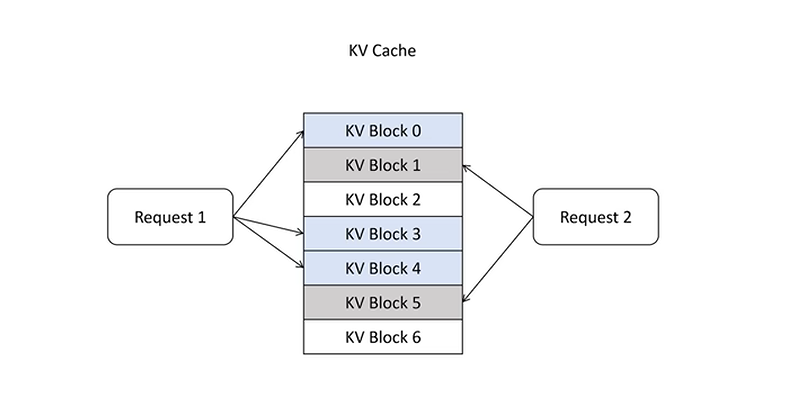
- KV Cache共享:当Prompt相同的时候,Paged Attention会将相同的KV Cache进行共享
- 页表映射共享:多个生成序列的逻辑页表可以指向同一个物理显存页,存储共享的 KV 数据
- 写时复制(Copy-on-Write):当某个请求需要修改共享页的内容时,系统会先复制该物理页到一个新页**(如从页3复制到页5)**,仅更新当前请求的页表,其他请求仍指向原页
Flash Attention
计算优化,着眼于减少IO访问量,通过芯片内缓存(SRAM中的)加快IO速度
看完下文GPU工作原理,你可以知道计算单元从SRAM读取数据的速度要比从HBM读取快得多,因此Flash attention的目标就是避免Attention计算的时候从HBM读写数据
这项技术为何而生?
- 传统注意力计算是从HBM读取数据进行计算,速度要慢得多
- 读取速度太慢,算力太强,导致GPU算力资源一直在等待数据读取
- 传统注意力计算不对矩阵进行分块处理,导致SRAM放不下这么大的数据,Pytorch虽然做了分块,但是需要多次读写中间结果,导致计算瓶颈
先来看看pytorch在attention上的实现
- 从HBM加载Q、K到SRAM
- 计算出
- 将写到HBM**(这里是为了存储中间激活值,做反向传播)**
- 从HBM读取到HRAM
- 计算
- 将写到HBM**(这里是为了存储中间激活值,做反向传播)**
- 从HBM加载到SRAM
- 计算
- 把写到HBM
- 返回
传统计算的性能瓶颈
- Compute-Bound(计算瓶颈):
- 来源:大的矩阵乘法,多通道的卷积
- 程序性能受限于GPU的计算能力,大部分时间花在数值运算或逻辑处理上
- Memory-Bound(内存瓶颈):
- 来源:ReLU,Softmax,Sum,Dropout等
- **程序性能受限于内存访问速度,**GPU经常等待数据加载
先介绍下Safe-Softmax
传统softmax
若使用混合精度进行训练,当输入数值非常大时,会造成数值溢出
Safe Softmax
- 通过减去输入的最大值来避免数值溢出
- 相当于分子分母同时除以,结果不变
核心工作原理是什么?
- Tiling Algorithm(分块计算)
- 核心思想就是根据SRAM块的大小将大的矩阵拆分成小的矩阵送入SRAM进行计算
- 传统注意力机制需要重复读写SRAM,而Flash Attention将矩阵分块后在SRAM中一次性算出最终结果
- Recomputation(重计算)
- GPU计算时间小于HBM读写时间,不再存储中间结果,反向传播的时候重新计算即可
- 对于,Flash Attention不进行HBM的存储,而是继续在SRAM中计算
- 对于,也不进行HBM的存储,而是继续集散
- Kernal Fusion(融合计算)
- 将多个操作融合成一个操作,以此减少HBM的读写
- 分块计算可以用一个Kernal完成注意力计算的所有操作
接下来看看分块计算在SRAM中是如何一次性到位的
首先取Q、K、V的小块,送入SRAM
计算
计算
这里并不是全局的softmax,而是局部的softmax
取出局部最大值,然后使用Safe-Softmax
下一次进入Safe-Softmax的时候,用上次的局部最大值和当前块的最大值算出新的最大值,然后进行Safe-Softmax的更新
- 举例:分为2块计算,
- 计算第一块内的最大值
- 第一个块内进行指数计算,
- 第一个块计算归一化因子
- 操作第二个块,更新最大值
- 同上,
- 第二个块计算归一化因子,
- 计算全局和
计算
从SRAM中取出回到HBM
GPU工作原理
使用SIMT单一指令,多线程进行,比如矩阵乘法里结果里的每个元素可以分配一个线程
GPU任务调度的最小单元:Warp(32个线程一组)
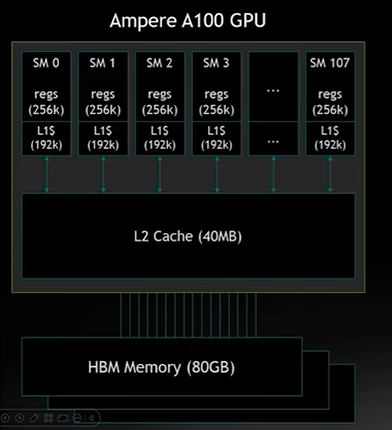
SM(流式多处理器):GPU核心计算单元
- CUDA Cores(CUDA 核心): 执行基本算术和逻辑运算
- Tensor Cores(张量核心): 专用于加速矩阵乘法,支持混合精度计算
- Warp Scheduler(Warp 调度器):管理Warp的执行,调度线程用的
- Shared Memory:供同一线程块的线程共享数据,可显式控制
- L1 Cache:缓存频繁访问的数据,硬件自动管理,无法直接控制
- Load/Store Units:负责从全局内存(HBM)或者共享内存(Shared Memory)加载数据
- Register File(寄存器文件):存储线程的私有变量
- SFU:执行超越函数或者复杂运算
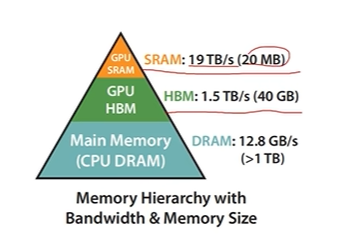
GPU的存储分为芯片内和芯片外:
- SRAM(芯片内):L1 Cache**(仅对当前 SM有效),L2 Cache(全局共享,所有SM共用),Shared Memory(同一线程块共享)**,用来存储数据,供计算单元快速读取
- HBM(芯片外):我们常说的显存(访问速度慢,空间大),所有线程可访问
访问速度
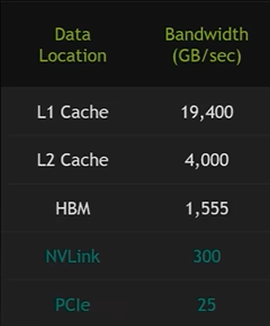
NVLink:GPU间高速互联(分布式训练)PCIe:CPU-GPU通信总线
因此要让计算模块尽可能多的从寄存器读取数据进行计算,因为寄存器带宽极高,访问速度极快
训练的时候数据传输流程:
- 数据加载:通过PCIe把数据从CPU内存拷贝到GPU HBM
- 计算准备:数据从HBM加载到L2 Cache然后到Shared Memory或者L1 Cache,最后传输到寄存器(线程私有)
- 先从HBM到全局共享区,所有SM共用,然后加载到特定SM,线程块可用,然后加载到指定线程的寄存器,给核心计算
- 核心计算: CUDA Core或者Tensor Core参与计算
- 数据传回:算好的数据传回HBM